
I’m building a small CNC lathe which I intend to control with g-code. It will have one nema 23 and 3 nema 17 motors.
Please could you suggest what boards I need to drive them? I’ve been testing with a TIC 500 and it looks like I’ll need to coax as much speed out of them as possible.
Hello.
Do you have a specific control board (that reads the G-code) in mind? We do not have any products to do that specifically or any recommendations for a specific one to use.
We make a number of different stepper motor drivers, many of which plug directly into common control boards. The best driver to use in an application like that depends on the electrical characteristics of the motors you are using. If you like the performance you are getting with the Tic T500, you might consider using one of our MP6500 drivers, which is what is featured on that Tic. If you post a link to a datasheet or product page for the stepper motors you plan to use, I might be able to make a more specific recommendation.
-Jon
thanks jonathan.These are my 17s:https://www.amazon.co.uk/gp/product/B06Y4NYJWN/ref=oh_aui_search_detailpage?ie=UTF8&psc=1
I was going to get this kit to make things simple: https://www.amazon.co.uk/gp/product/B07BB979R4/ref=ox_sc_saved_title_9?smid=A281VSOIV3TOD6&psc=1
but now I’m not so sure. I want max rpm out of my motors (i’ll have 4 axes in total) and i’m not sure if i can do that with this kit. I tested for RPM today with the TIC 500 and I only got 60rpm. Thats with a 19v psu. I thought i might go up to 36v but a) will that make a difference and b) I was told to limit the psu to 2/3 of the driver board rating becasue of risks with back emf.
did i give you all the information you need jonathan?
I’m only getting 60 rpm using a nema 17 under no load, 19v psu, software set to 1.7A and full steps.
Am I doing something wrong or is that the best I can expect?
I merged your posts, since they are about the same thing.
The NEMA 17 motors you linked to have a 1.7A current draw, so they are right at the limit of working outright with the MP6500 and Tic T500, which can only handle 1.5A continuously without external cooling. Since you are able to control your motor, it seems like this has not been an issue for you, but if you run into any overheating issues, you might have to add a fan and heatsink to your Tic. However, at the point where you want to change your setup from using a Tic to a CNC board and a few stepper motor drivers, you might consider using our TB67S249FTG stepper motor driver carrier, which can handle 1.7A continuously. (Note that it does not have the same form factor as many of our other stepper motor drivers, so instead of plugging it in directly, you will probably have to manually wire it to your CNC control board.)
1 revolution per second seems pretty slow for how you are running that stepper motor. You might consider reading this forum post by Ben, which has tips for achieving faster step rates.
We do not have a driver that is powerful enough to handle the 2.8A current draw of that NEMA 23 stepper motor.
As for your other questions: yes, increasing your supply voltage from 19V to 36V will allow the current to rise quicker, which should allow your system to achieve a higher step rate. I suspect the advice you were told about limiting the power supply voltage is aimed at reducing the effect of voltage spikes, which get worse as the voltage increases. Adding a large electrolytic capacitor across power and ground on the stepper motor driver should mitigate the effect of those voltage spikes. (Our Tic stepper motor drivers already have a built-in capacitor for this purpose.)
By the way, from the pictures on the Amazon page for that kit, it looks like it uses knock-off versions of our DRV8825 drivers (they might not work the same as our boards).
-Jon
Thanks, Jon. Having read Ben’s post, I’m wondering if I’m using your software wrongly to only get 60rpm. I’m giving the TIC 500 19v, current limit is set to 1.7A and theres no load.
If I posted some screenshots of my settings would you be able to spot any stupid errors?
It would be easier if you posted your complete settings file. To generate a .txt file of your settings, open up the Tic Control Center and click File > Save settings file.
-Jon
hope this is ok?
# Pololu Tic USB Stepper Controller settings file.
# https://www.pololu.com/docs/0J71
product: T500
control_mode: serial
never_sleep: false
disable_safe_start: false
ignore_err_line_high: false
auto_clear_driver_error: true
soft_error_response: decel_to_hold
soft_error_position: 0
serial_baud_rate: 9600
serial_device_number: 14
command_timeout: 1000
serial_crc_enabled: false
serial_response_delay: 0
vin_calibration: 0
input_averaging_enabled: true
input_hysteresis: 0
input_scaling_degree: linear
input_invert: false
input_min: 0
input_neutral_min: 2015
input_neutral_max: 2080
input_max: 4095
output_min: -200
output_max: 200
encoder_prescaler: 1
encoder_postscaler: 1
encoder_unlimited: false
scl_config: default
sda_config: default
tx_config: default
rx_config: default
rc_config: default
current_limit: 343
current_limit_during_error: -1
step_mode: 8
max_speed: 500000000
starting_speed: 0
max_accel: 40000
max_decel: 0
invert_motor_direction: false
Hiya Jon. Did you have a chance to look at my settings?
It looks like your current limit is set at 343mA, which is very low for a 1.7A stepper motor. Can you set your current limit to 1500mA? (This parameter can be adjusted under the “Input and motor settings” tab of the Tic Control Center.) Can you also set the Step mode to Full step for now? Aside from that, your settings seem fine.
Are you using the slider under the “Set target” section of the “Status” tab of the Tic Control Center to set the velocity of your stepper motor? If so, it might be that you need to edit the maximum value allowed by that feature by clicking the field for the value and manually entering a higher number. This value is by default 200pulses/s, which for most of our stepper motors corresponds to 1 RPM (in full step mode).
-Jon
I set the current limit up at 1500ma, step mode to full. I changed the slider settings to 1000/-1000 but theres no increase in speed after 200pps.
Still only getting 60rpm with all these changes.
Is the baud rate ok?
its been so consistently a maximum of 60rpm its almost as if there’s a ‘maximum rpm’ setting.
I recorded a quick vid. The motor speed and noise are the same as this even when its not under load.
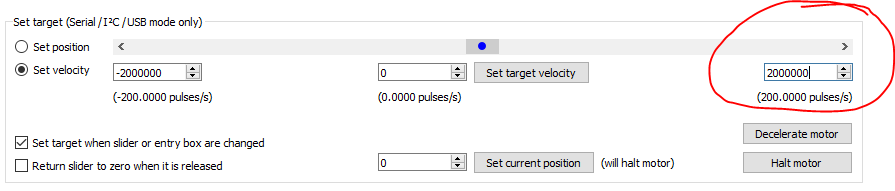
Since you are still limited to 1RPM, it sounds like you might not be changing the correct value. Can you verify that you are editing the field that corresponds to the maximum velocity in the Tic Control Center? This is the rightmost parameter under the “Set target (Serial / I²C /USB mode only)” field. I have circled this field in red in the picture below:
-Jon
Yes - I set that up to the maximum it would allow.
I dont know why,but this morning it worked fine. I have no idea what i did that was different. I can get the nema 17 up to about 21000pps (1/8 microstepping) and my nema 23 up to about 480000pps.
Mystified but … the main thing is that its working. Really appreciate your help Jon.
1 Like