Hi all!
I’m a French beginner in robot building. I work actually on this project: a little robot with IA in UMPC (viliv S5) developed in Java language and this java application pilot an arduino uno itself pilots the chassis and motor of my robot. (For information my robot must only go forward/backward and turn right/left) I have very good skills in application development but I don’t have big skill in electronic. 
For the chassis I want to use the lynxmotion Terminator lynxmotion.com/p-41-terminat … onics.aspx
The lynxmotion Terminator chassis is delivered with 12v motor 50:1… See specs here lynxmotion.com/images/data/ghm02.pdf
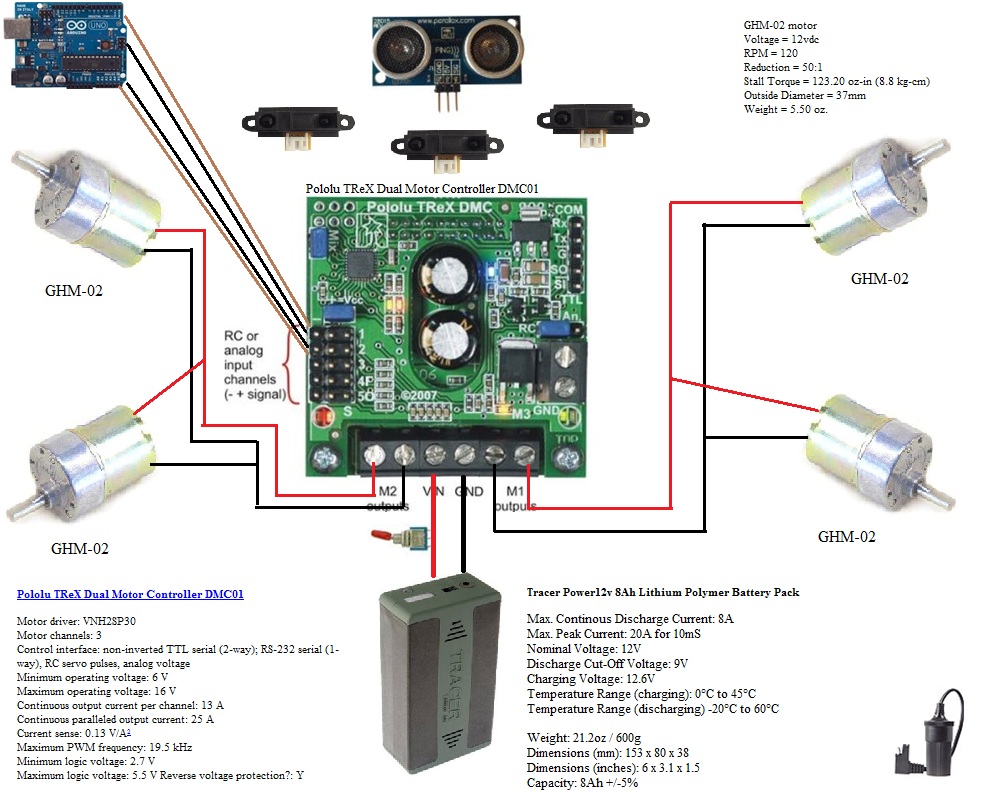
I want use motor speed controller (and not wheels encoders) and i want use the pololu Pololu TReX Dual Motor Controller DMC01 and connect each couple of motors in parallel. Like this (I have produce I little schemas): darylrobotproject.files.wordpres … /daryl.jpg
1st question: You think this is good solution to connect each couple of motors in parallel? You think that Pololu TReX Dual Motor Controller DMC01 is well adapted to my motors and my project?
2sd question: I already use serial port of my arduino uno in order to communicate with my java application. I see that rx/tx on Trex is the easier solution to control the motors from arduino. But i can control my motors speed from arduino pwm pins? I have understood that in this case it was necessary to use RC mode. That is correct?
3rd question: In case I should use RC mode, i must connect the arduino pwm pin to RC channel 1 pin (white in your pdf) and ground only correct? (not +5v because it use to give +5v to RC controler). Correct?
I have see how to reverse easily direction of the motor with the serial rxtx mode, but how work reverse with RC mode?
4th question: Last important question about battery: for my project 12V battery is enough? How much capacity? I can use this lipo battery with 8ah: deben.com/lithium-polymer-ba … -pack.html you think it is adapted to my project?
Thank you very much for you help and sorry for my bad English. 
Best regard,
Christopher
Hello, Christopher.
I have numbered my responses to your questions and provided them below:
- Connecting the motors in parallel like that sounds like a good solution. I recommend soldering a .1uF capacitor across the motor leads of each motor to smooth out power distribution. You can find diagrams showing these capacitors in Section 3.a. of the user’s guide:
pololu.com/docs/0J1/all
- Since you are using an Arduino, I think serial is the better choice. You can use the SoftwareSerial library to create multiple virtual serial ports on the Arduino so you can interface with both the TReX and your other device:
arduino.cc/en/Reference/SoftwareSerial
However, please note that when using multiple software serial ports, only one can receive data at a time.
- Generally, what capacity you want for your battery is dependent on how long you want your robot to run, but that battery pack looks reasonable for your application.
Hi Jonathan,
Thank you very much for your quick responses.
1/ Cool if connecting my motors in parallel is a good solution and TReX Dual Motor Controller DMC01 is well adapted to my chassis/motors (I am reassured). Just for my understanding, TreX is suitable for my project because TReX allow 30A peak and up to 13 A continuous per channel and my 4 motors may current (at 12v no load) = 90mA, current (at 12v locked shaft) = 1.5A. And like i connect each couple of motors in parallel i can have max 1.5*2 per channels and like 3A < 13A, it’s ok, right? lynxmotion.com/p-94-gear-hea … shaft.aspx
Thank you for the tip concerning the capacitor. I just want to know what is the difference between connect capacitor on + and - connector OR connect capacitor on + and motor shield and - and motor shield?
I think lynxmotion motors are delivered with capacitors for terminator kit: see fig 5 & 6: lynxmotion.com/images/html/build06a.htm
2/ Yes i think i’ll use serial mode if i could 
3/ Cool if this battery pack looks reasonable for your application. I have asked this question because one man say to me that is dangerous to use this pack if the motors are locked shaft because according to him if my robot is blocked for any reasons (wall…) all motors load 3A per channels and 6A total on controler and he say that the battery don’t like that. What do you think about that? Specs of this lipo battery pack:
Max. Continous Discharge Current -> 8A
Max. Peak Current -> 20A for 10mS
Nominal Voltage -> 12V
Discharge Cut-Off Voltage -> 9V
Charging Voltage -> 12.6V
Thank you very much to help me to go forward on my project.
Christopher
- Yes, that is correct.
For best results, all three connections can be made on the same motor . You can find more information about smoothing motor noise in our application note here:
pololu.com/docs/0J15/9
- In general, you want your battery pack to be able to supply a continuous discharge current greater than the maximum current draw for your application. In this case, if all of your motors have stalled (locked), you would draw 1.5 * 4 = 6.0A of current plus whatever else your system uses. Since your battery can supply 8A, you should be safe (though you would not want to keep the motors stalled for very long for the sake of the motors!)
Thank you very much for your precious help Jonathan 
I have a last little question about battery capacity.
When i look the motors specs, i can see Current at Rated Load (1.14Kg-cm):< 269mA
If i consider that my robot is at rated load 1.14Kg-cm and to be large it draw 300mA*4 = 1200mA
And if my battery capacity is 8000mAh then 8000/1200=6.66…h
My battery will hold approximately a little more than 6 hours. This is correct?
Your battery capacity assumptions and calculations sound fine to me.
Thank you Jonathan for your help, i can go to buy ma pololu Trex now ! 

{kind=link}