I bought 4.4:1 metal gearmotor 25Dx63L from you which arrived last week. I calculated some parameters, which are:
The motor resistance was found by dividing the rated voltage by the stall current
R=12V/1.8A=6.6ohms;
Ke was found by dividing the rated voltage by the free-run speed without gearbox = 8200rpm=858.7rad/s. Ke=12V/858.7rad/s=0.01397.
Motor torque without gearbox constant (Kt) was found by dividing the stall torque by the stall current.
Motor torque was found 0.17*9.81/100=0.016678Nm, thus Kt=0.016678Nm/1.8A=0.009265
Kindly could you confirm the above parameters are correct? and finally also could you advice how to find J(moment of inertia of rotor) and B(viscous coefficient of friction of rotor) because I don’t have an idea where to get them.
Just to confirm, it sounds like you are talking about our 4.4:1 Metal Gearmotor 25Dx63L mm MP 12V, either product #4861 (the version with an encoder), or product #3225 (the version without the encoder). Is that correct?
If that is correct, then most of your calculations so far seem okay. You could get a better value for motor torque constant (Kt) by factoring in the no-load current draw into your calculation, like so:
Kt = stall torque / (stall current - free run current)
However, depending on what you are aiming to do with these values, you might consider doing these calculations using the performance specs for the motor with the gearbox instead of the motor without the gearbox. That way your values will have the effects of the gearbox factored in.
We have not characterized the moment of inertia for our motors yet, but you could approximate that using the dimensions of the output shaft. The output shaft is made of stainless steel, and its dimensions can be found in the motor’s dimension diagram, which is available on the product page under the resources tab. Alternatively, you might be able to come up with a better estimate using the experimental procedure described here. Ultimately though, I would expect the rotor inertia to essentially be negligible once anything of substantial inertia is attached to your motor or once your motor is loaded in a real application, so it might be better to focus on characterizing that inertia first.
The viscous friction coefficient (B) can be determined by dividing the no-load current by the no-load speed and multiplying by the motor torque constant.
Dear PatrickM
Many thanks for your reply, your info is very fruitful.
My motor is with gearbox and encoder, I am recalculating the parameters with the gearbox ratio 4.4:1which are as follows:
Ke=rated voltage(12V) divided by gearbox speed(188rad/s).=12V/188= 0.0638
Motor Torque constant with gearbox, Kt is stall torque divided by stall current =0.71x9.81/(100x1.7)=0.0410
The(B) viscous friction coefficient= 0.075Ax0.0410/188=1.636x10^-5
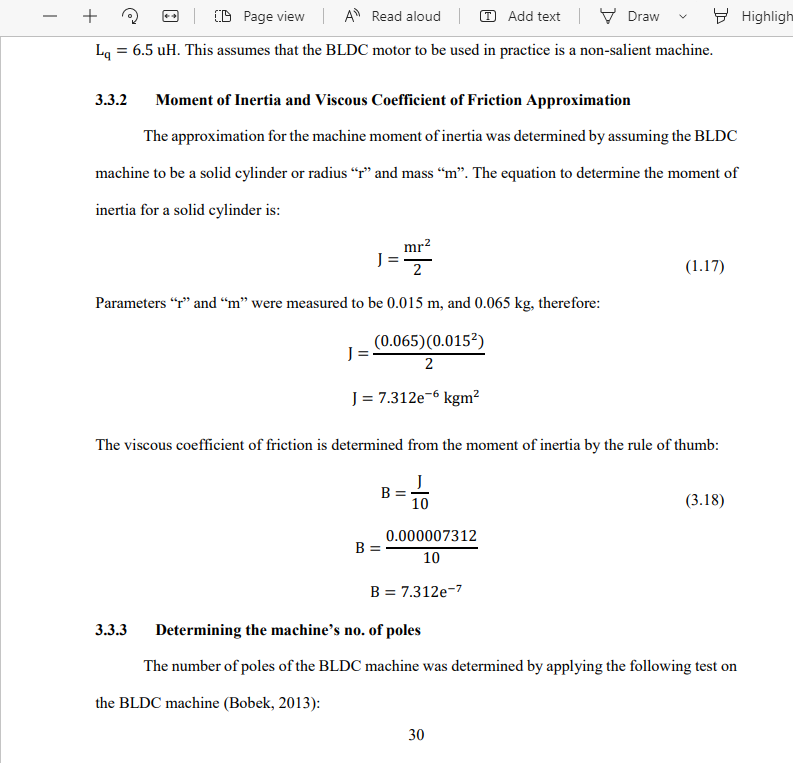
The J (inertia of the motor rotor with gearbox ) =10B(rule of thumb, found on the internet stated in an academic paper)
J=B10=(1.636x10^-5)x10=1.636x10^-4
Kindly could you again comment if these new parameters if they are correct, please?
Your calculations for the back EMF constant, motor torque constant, and viscous friction coefficient look okay, though keep in mind that these are theoretical approximations. They might be a good starting point for whatever you are trying to do, but if you need more precise values then you should probably consider doing some experiments to get empirical data.
I am not familiar with the rule of thumb you shared for calculating moment of inertia, so I would be interested in knowing where that came from.
The said rule of thumb seen in the academic paperlink, is applied on small BLDC motor. By chance, may this approximation applies to my motor? Kindly advice.
I am skeptical that would be a good assumption for our brushed DC motors. I have not examined the full paper, but in addition to never hearing of this rule of thumb before this (which is not cited), the method for that paper gives estimating the moment of inertia for the rotor given in your image seems highly questionable to me. (It might be good for giving you an upper limit to check your approximation against, but a lot of the mass of a DC motor is not going to rotate and is therefore irrelevant for the moment of inertia we are interested in.)