Dear people.
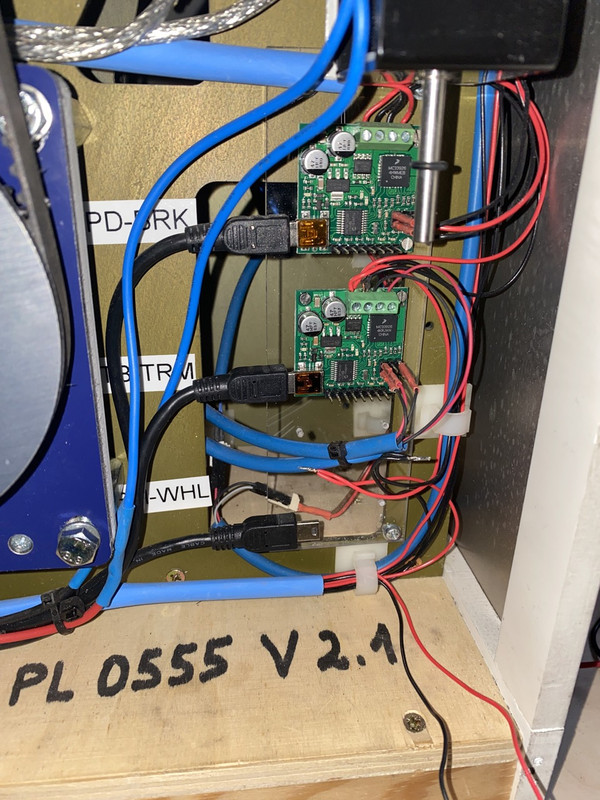
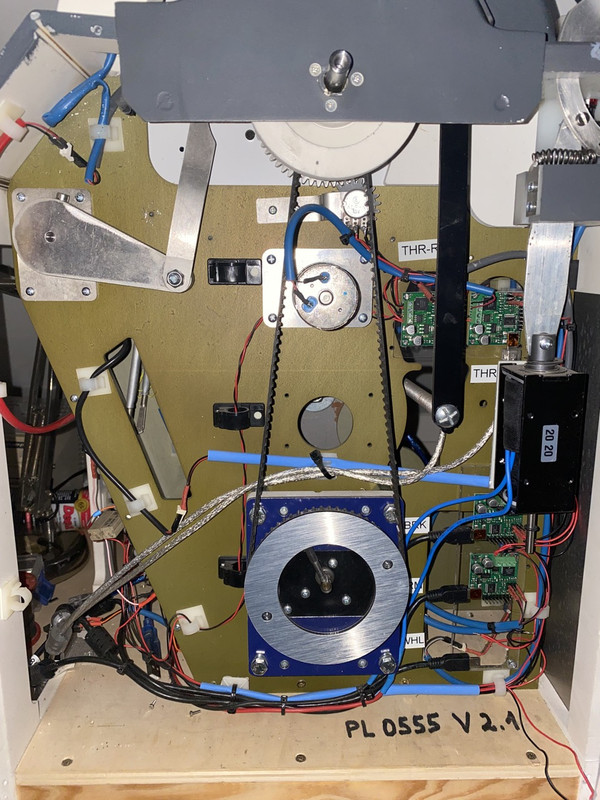
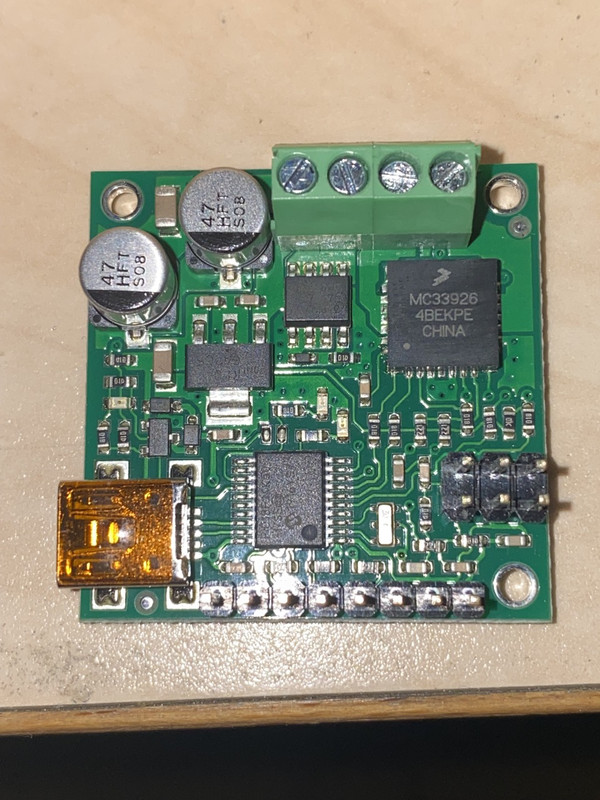
I am equipping a throttle quadrant of a boeing 737 with DC servomotors using 5 Pololu 21V3 dcmotor controllers.
Everything worked fine wich means that all motors are succesfully driven. until I transferred the software to another PC. At a certain moment I saw that when controlling one DC-motor, the other servomotors also moved very slightly. Strange because that wasn’t the case on the first PC. Soon I noticed that two DC-motors stopped working.
First of all, I checked the DC-motors and one motor turned out to be defective. Then checked the jrk 12v3 controllers, there was one defective.
Summary:
Two control elements no longer worked,
• One control element was defective and had a defective Servomotor
• An other control element was defective and had a defective Jrk 21V3
I have now ordered a new servo.
The defective Jrk 21v3 does not cause any problems in the controller software, you can clearly see that the motor receives voltage, but phisically the motor does not receive voltage at the terminals on the PCB. Even after reinstalling the firmware (v 1.3) there is no voltage coming at the motor terminals on the PCB.
For the power supply I use a 12 volt 60A server power supply.
I have connected all the USB controllers to a USB Hub with its own power supply.
I have the impression that somewhere a ground loop is created and that somewhere high currents are flowing in the circuits. However, I have no idea where……and how to prevent that.
How do I make my setup immune to groundloop?
I think I should investigate this problem further before installing a new motorcontroller and put the powerssupply on again.
Resume:
• How do I make my setup immune to groundloop? Is there detailed documentation available?
• It may be that the motor control on the Jrk 21.v3 PCB has become defective. Even though the behaviors in the controller software and the LEDs on the PCB are good.
• In Europe the motor controllers are difficult to obtain, does anyone have an address to buy them there?
Kind regards Leo