
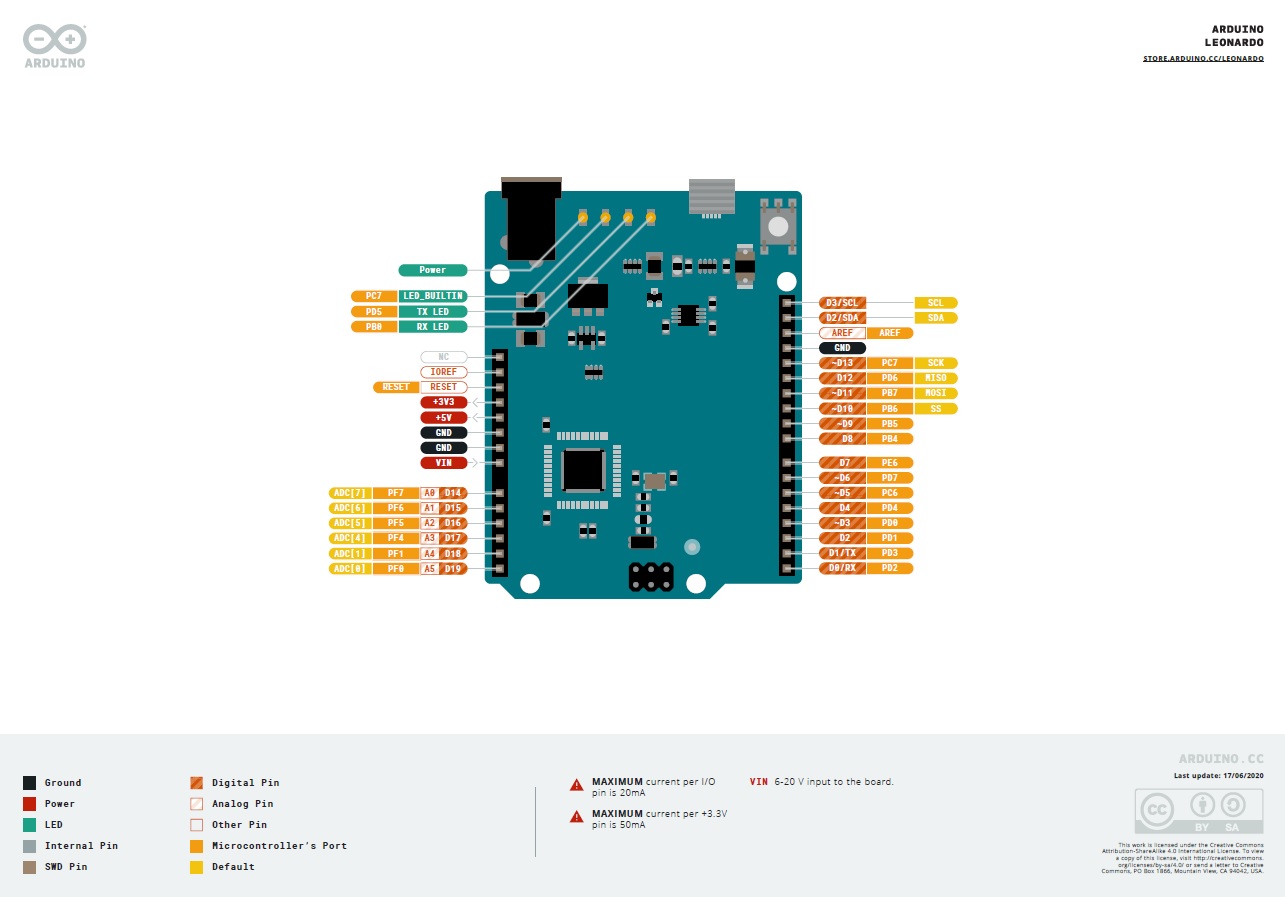
Thank you so much for responding, and responding so quickly! I was wondering about the 2x3 ICSP header. I certainly noted those connections in other examples (e.g. Two 36v4 drivers and two stepper motors - #11 by BenJSharman). As those are dedicated pins, that would be the obvious route to go. Unfortunately, left to my own devices, I reached for digital pins 11-13 as a substitute for two reasons: First, I don’t have any of those fancy, jumper wires with male and female ends, rather just salvaged 20 AWG copper wire. Perhaps I skipped the simple route due to lack of supplies and no way to easily connect to the ICSP header (I will work on getting some jumpers, so bear with me). Second, with the simple route blocked, I held out hope that the Leonardo digital pins 11-13 would work as an alternative based on my reading of the Arduino.cc pinout diagram (see picture). But now I’m gathering that those pins may only be used that way in some secondary configurations. Of course, I noticed that I made no explicit calls to pins 11-13, but that didn’t prevent my wishful thinking.
Thanks also for your sharp eye which noticed the somewhat frayed ends of my power supply feed wires. I appreciate the nugget of common-sense advice. I will clean up those wires.