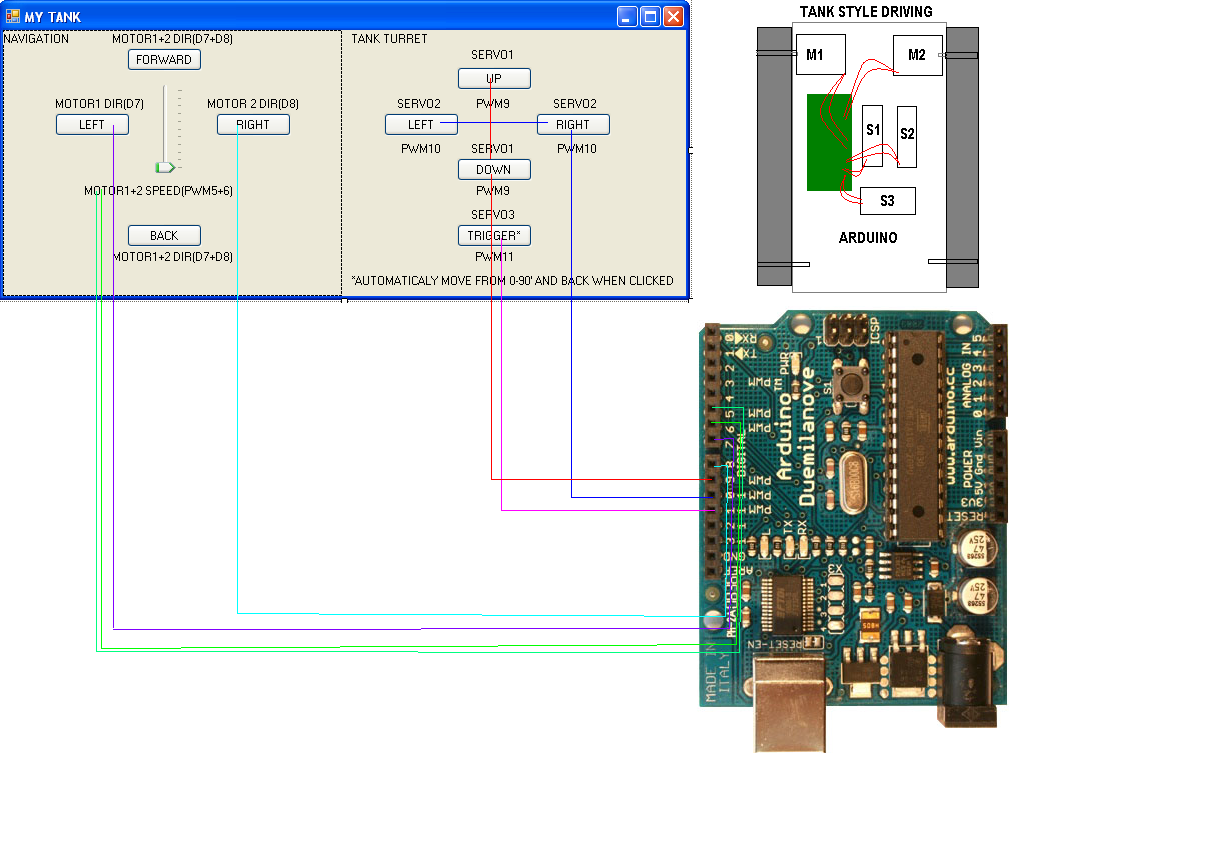
Can someone please post a picture on how to connect the Pololu High-Power Motor Driver 18v15 to an Arduino Duemilanove. and if possible can someone please post me a scetch that I can use for the following setup, see attached picture, and if there are any proramming experts out there that can write a “simple” c# app similar to the one in the attached picture.
Thank you and regards,
Riaan Deyzel
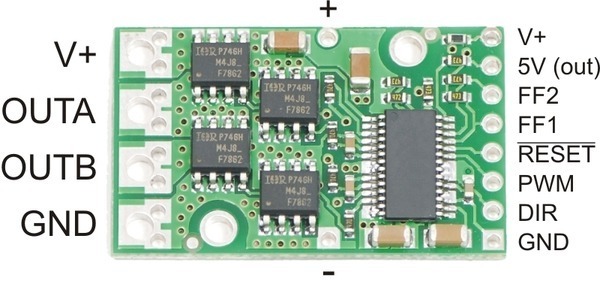
The minimum connections you need to make are V+,GND, OUTA, and OUTB on the motor power side (the side with bigger through-holes) and PWM and DIR on the logic side (the side with smaller through-holes).
If you post an image showing how you think it should be connected, I can look at it to help you make sure it is correct. You could use this picture as a starting point:
Here is the current scetch which I modified to change the pan servo to pin 9
Code:
// Importa a biblioteca Servo.h do arduino
#include <Servo.h>
// Cria uma variavel do tipo Servo que será
// o nosso servo.
Servo servo1;
// Array de char que receberá o comando
// via serial
char buffer[4];
// Variavel que identifica quantos
// caracteres foram recebidos, pois só é
// possível receber um caracter por vez
int received;
void setup(){
// Define o baud rate (taxa de trasmissão) como 9600
Serial.begin(9600);
// Atribui o servo ao pino 9 do Arduino
servo1.attach(9);
// Atribui o valor 0 para a variavel received
received = 0;
// Na posição 0 do array, atribui o valor '\0'
// que identifica onde começa o array
buffer[received] = '\0';
}
void loop(){
// Verifica se existe alguma entrada de dados
// disponivel na entrada serial
if(Serial.available()){
// Salva os caracteres no array a cada iteração
buffer[received++] = Serial.read();
if(received >= (sizeof(buffer)-1)){
// Imprime na saída serial o valor
// Apenas para mostrar o valor
Serial.println(buffer);
// Converte o valor de "char" para "int"
int numero = atoi(buffer);
// Envia o comando para o Servo Motor
servo1.write(numero);
// Zera novamente a variavel
received = 0;
}
// Limpa o buffer da entrada serial
Serial.flush();
}
}
That was the easy part, now I need to add support for an second servo “tilt servo” on pin 10, I can copy the code & buttons from the pan buttons and use them for the tilt buttons, but not sure how to link it to the scetch from the C# app, as the same servo on Pin 9 would probabbly move when I press the Tilt (up/Down Buttons). (See link in above post for source code & original Scetch)
Can anyone please help with this?
Thanks
It looks like you are reading from a serial port with your sketch. You need to make your C# application write commands to the serial port, and then have your sketch execute the commands that it reads.