
Hello,
Absolute newb here. My setup: Arduino Uno R3, Arduino Ethernet Shield, Pololu A4988 with voltage regulators. 12V (.35 A/ phase) NEMA 17 Stepper. Here is the motor datasheet. [url]http://www.adafruit.com/datasheets/12vstepper.jpg[/url]
I am using a 12V adapter - [url]Pololu - Wall Power Adapter: 12VDC, 1A, 5.5×2.1mm Barrel Jack, Center-Positive.
My setup “works”, but I am getting super low torque. Barely enough to spin the motor with only a piece of e-tape attached to the shaft. I’m using AccelStepper library for testing. Here is my code:
#include <AccelStepper.h>
// Define a stepper and the pins it will use
AccelStepper stepper(1, 3, 2); // Defaults to AccelStepper::FULL4WIRE (4 pins) on 2, 3, 4, 5
void setup()
{
stepper.setMaxSpeed(200.0);
stepper.setAcceleration(100.0);
}
void loop()
{
stepper.runToNewPosition(0);
stepper.runToNewPosition(500);
stepper.runToNewPosition(100);
stepper.runToNewPosition(120);
}
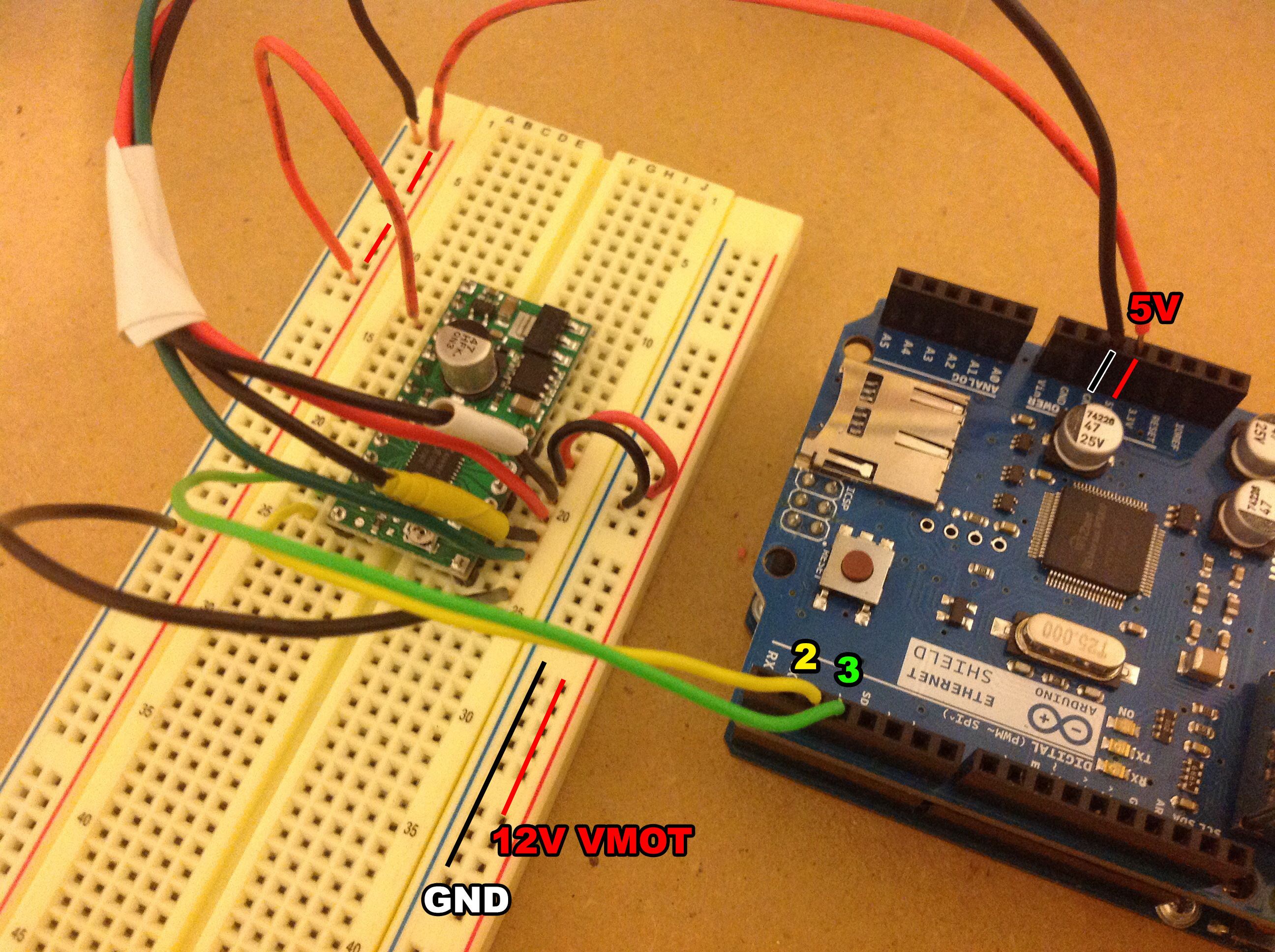
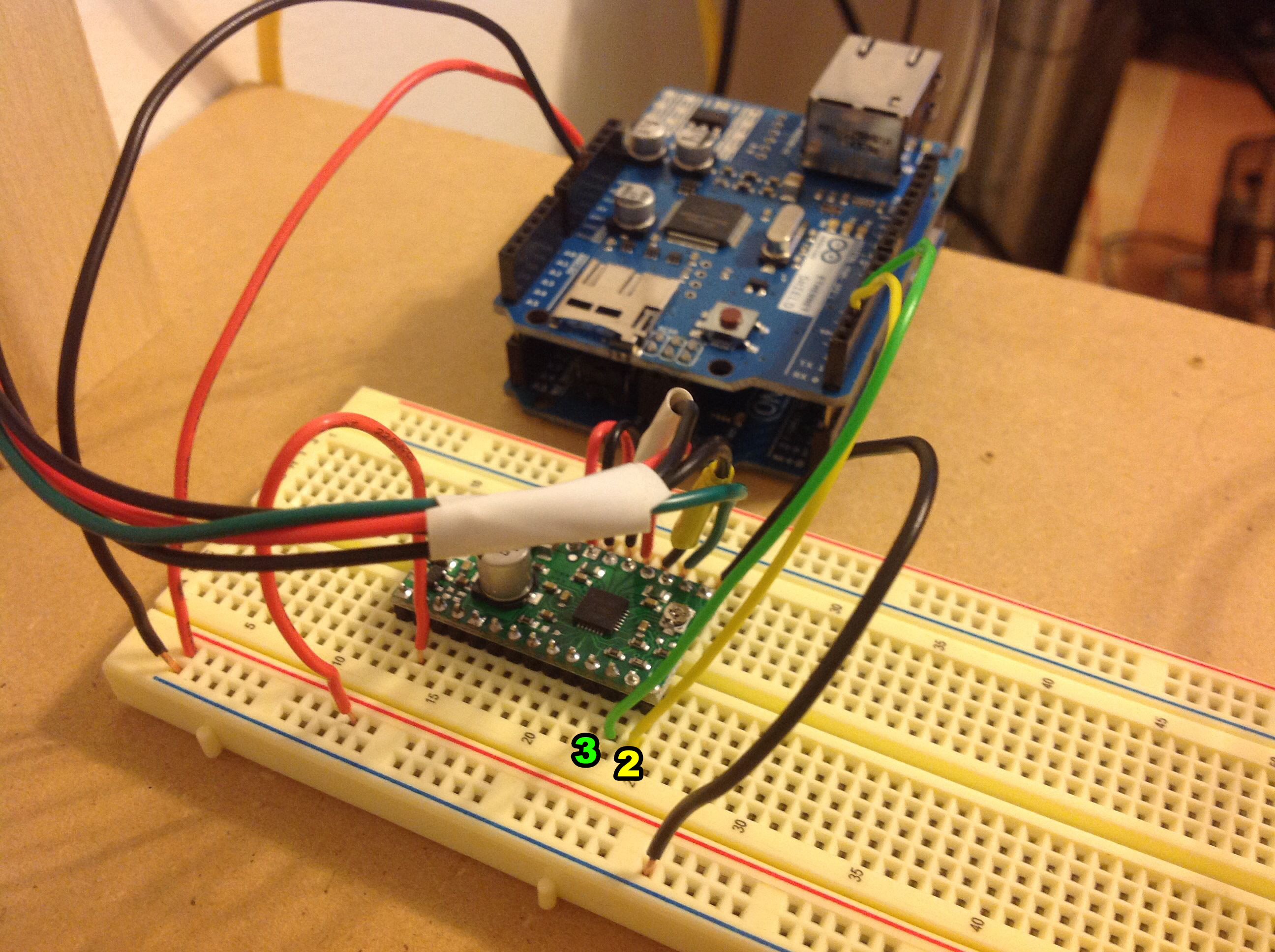
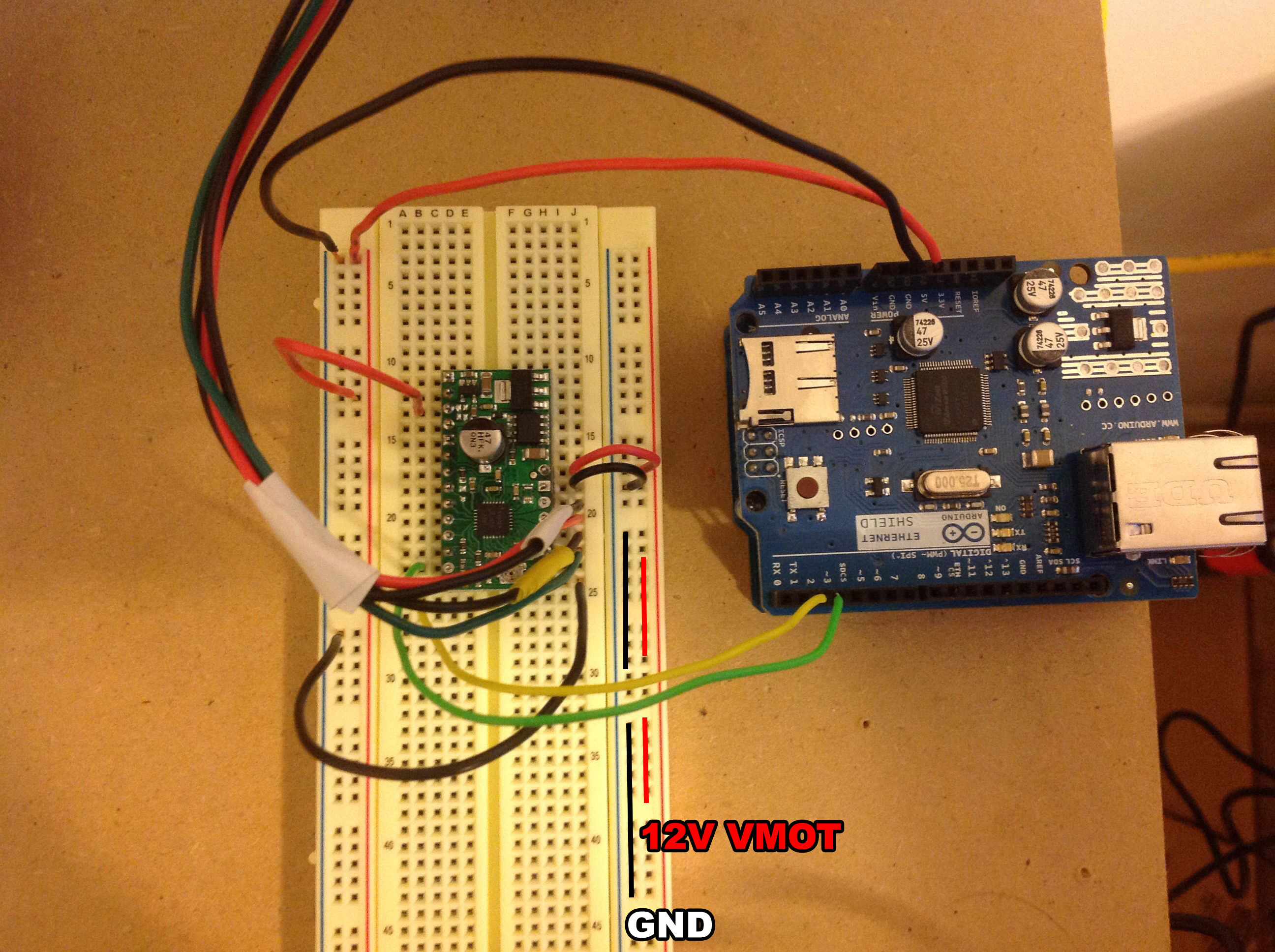
Here are some pics of my setup.
![http://www.adafruit.com/datasheets/12vstepper.jpg[/url]](http://www.adafruit.com/datasheets/12vstepper.jpg%5B/url%5D){kind=link}
I have many questions, but I’ll let you take a look at the setup first and see if anything seems wacky to you. I’m not exactly sure how to best go about adjusting the current trimmer pot, and the initial results I’m getting makes me suspect I have something really messed up in my setup.
Thanks in advance for any help.