I’m an engineer and exhibit developer. I’m prototyping a stepper driver system based on Arduino and your products. I have 15 years experience in exhibits, following 10 years in motion control, robotics and embedded systems.
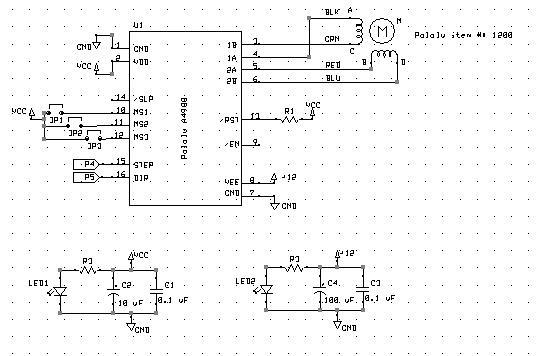
Below is a schematic of the motor connections I am using. The motor center taps are left out for clarity, they are isolated and capped. The A4988 pin numbers shown are those of a conventional 16 pin IC. I’ve triple checked everything to be sure this is what I think I want, and what I have wired up.
The symptoms I’m getting are: somewhat weak torque; an intermittent tendency to take the first step from rest in the wrong direction; and the effect of microstepping is to reduce the angular speed by the expected ratio when slewing, but maintaining a single step minimum resolution at low speeds… with the big step happening about every nth step pulse. In short, classic symptoms of scrambled phases / coils. The phases look OK on the o-scope, but W/O a logic analyzer (just a 2 channel storage scope) I can’t be sure of phase ID. The motor buzzes out as expected.
Do you see anything I’ve bungled, or is there something off in the documentation? I’ve never had this symptom and NOT immediately found a silly wiring boo-boo… but this one has me stumped.
Have you adjusted the current limiting pot? What current did you set it to? Instructions for adjusting it are available on the stepper motor driver product page. Does your device with pins named P4 and P5 share a common ground with the driver?
Yep, I calibrated to 1000mA (taking into account the 0.7 max duty cycle), and yep, logic and motor grounds are shared… thanks for the question, I forgot to mention those facts in the run-down. And while we’re here, I’ll mention that I am enforcing step pulse width and dir set-up criteria as well. I’m fairly sure the A4988 is functioning correctly, I strongly suspect that this is a problem with phase ID / wiring.
If there is not a known problem with the docs or a stupid mistake I’m too close to to see, I might just try all the possible phase wirings… there are only what, 6? Given that at least the two ends of each motor coil can be identified, there is just identity and polarity at issue… yep, I think that’s 6 possible variations. Seems like a cop-out though!
OH FOR CRYING OUT LOUD. So much for triple checking: I color coded the wires from A4988 to the screw terminal block for the motor phases, and I cross wired one set. Looked at it uncountable times to verify correctness and still failed to see the obvious.
The schematic is fine, the docs are fine, it’s my eyes that need work.