I’m new to robotics and am building a small rover platform. I would like to power a 19:1, 37 mm, 12v gear motor with a 14.8v / 4 cell LiPo battery pack. It will be controlled by an 18v7 simple motor controller.
Do I need a step-down regulator to bring the battery voltage down to 12v, or can that motor handle 14.8v ?
What VIN detection settings would you recommend for a 4 cell LiPo?
Going a bit over the rated voltage of a brushed DC motor generally will not damage the motor right away. However, operating a brushed DC motor at higher voltages decreases the life of the motor. Also, a fully charged battery can have an actual voltage a couple of volts higher than the nominal voltage. You can limit the voltage using a regulator, but generally, this option is difficult to implement because it can be hard to find a regulator that can source enough current for a motor. Alternatively, you could limit the effective voltage by limiting the duty cycle. This can be done with the Simple Motor Controller using the max speed setting, which can be set in the Simple Motor Control Center. You can read more about setting the max speed in the “Motor Settings” section in the Simple Motor Controller user’s guide, which can be found under the “Resources” tab on the controller’s product page.
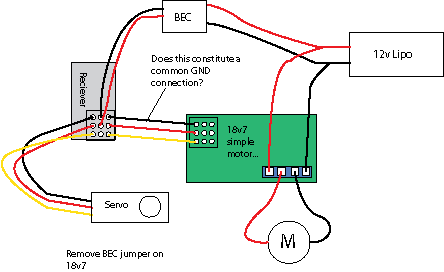
That looks mostly fine, but with the BEC jumper removed, the RC power pins on the Simple Motor Controller do not connect to anything else on the controller, so the power connection from the receiver to it is unnecessary. You also do not need the ground connection you point out in your diagram since the battery is already providing a common ground, but it should not hurt anything, and it is probably good practice to include it in case you change some of your connections later.