Hello!
Recently I’ve run into the issue of a couple of 24v13’s (6.5 to 40V, up to 13A continuous) failing randomly. We are using them to control motors on a robot. A couple days into testing, the first driver failed, and after replacing it with another one, that one failed after around 2 weeks (~1 hour of use per day on average). I do not have the strongest background in electronics (second year engineering student), so I was wondering if someone could look over my setup and help me narrow down what the issue could be before I end up burning through more drivers.
The driver input is from a 22.2V battery, fully charged up before use (So ~25.1V) . I use the drivers to control two motors on each side - both of which are 24V motors. The stall current of each of the motors is 2.85A, so I figured I could drive both wheels off of one driver because even at stall speeds, the motors would draw ~5.7A. Although I do realize that there may be short bursts of currents higher than that stall speed, it should not be a problem (feel free to correct me if I am wrong on this though!).
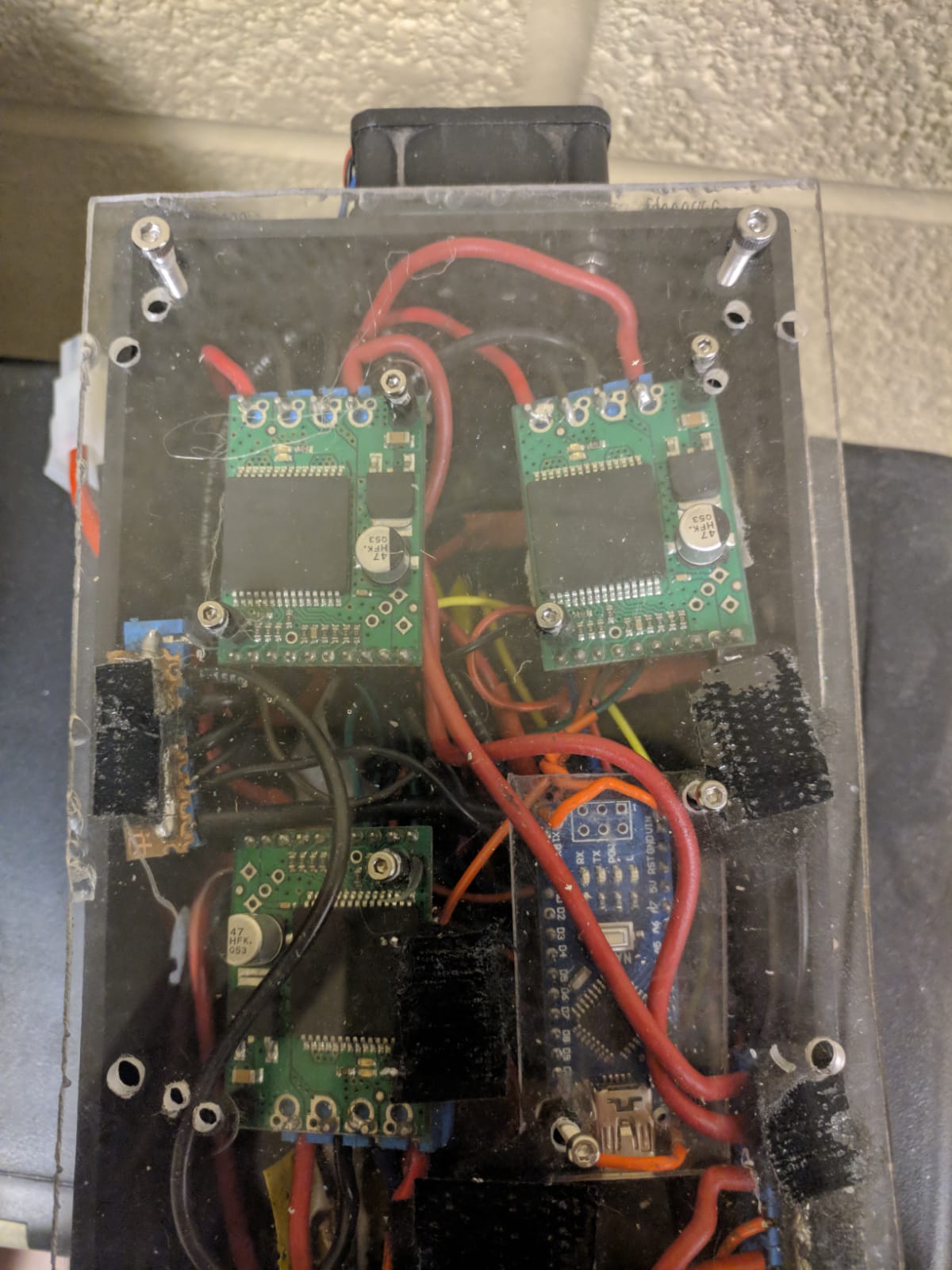
I have soldered two 120uF 50V radial capacitors in parallel , and the drivers are being controlled through an arduino nano. I use 4 pins on the driver - DIR, PWM, SLP & GND. I have ensured that the capacitors are soldered on with the correct polarity. The driver seems to work for a little while on the rover, before completely dying, and not giving any output on the OUTA & OUTB (they give an extremely small reading) when measured with a multi meter.
Temperature is not an issue due to it being in an enclosure that is air-cooled, and because the typical current draw is ~1.6A per motor. The only thing that I can think of that is causing the failure is back-emf from the motors, because the failure seems to occur after the robot has been in motion for a while. Although I haven’t measured the back-emf voltage, it may be larger than what the capacitor can handle. Re-reading the manual states that a capacitor with “a couple hundred uF” should be used, so my next step would be to purchase a 1000uF 50V capacitor and hope that works.
I was wondering if someone who is more knowledgeable than I am can look at my situation and figure out if my assumption is correct. Feel free to let me know if you need any more information about my setup, and any help would be much appreciated. Thanks!