
I have not purchase any components of the project yet,
Here is a summary of my project, it is a liquid dispensing of 12 liquids, each will have its own pump, Piston pumps not prestaltic because of accuracy reasons,
The challenge, I need stepper motors (specific pump) to run at a specific rate, in this case time is calculated OR the stepper motor has to spin specific rounds (which means that the pump has revolved for specific strokes number ) on both cases dispensed liquid volume is pre-determined)
100mL/min * 10 minutes = 1000 mL liquid OR
1000 rounds * ( 1mL for each stroke or piston volume) = 1000mL
I will instruct the stepper motor to spin for 10 min. OR to spin for 1000 rounds
Of course, second approach is preferred.,
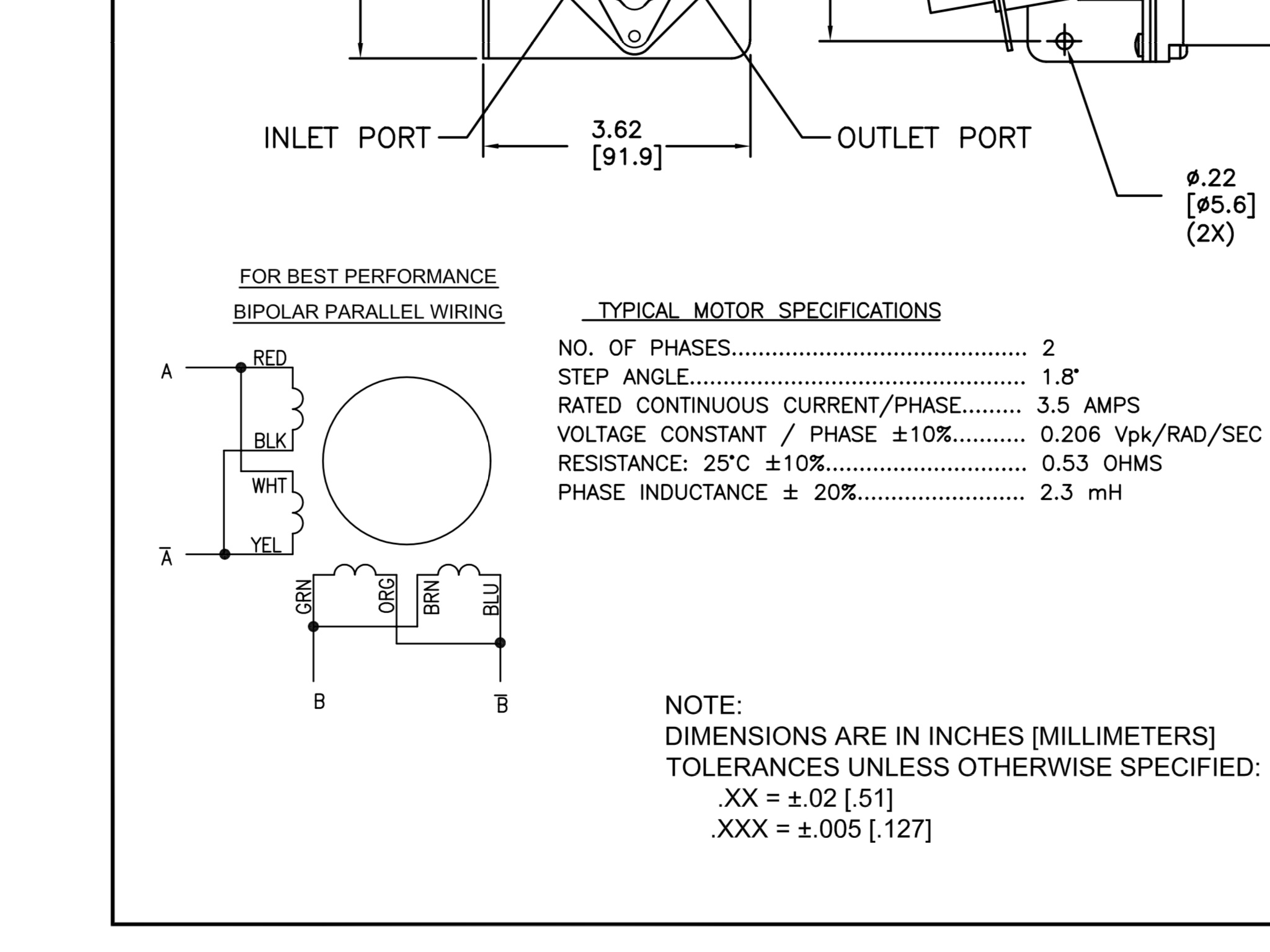
Maximum RPM need to reach is around 1200RPM in most cases, number of stepper needed is around 12 and it shall be expandable with one board, Arduino mega 2560 is nominated as controller, stepper motor specs (attached) but suggestions are also welcomed,
The support I need is on the proper selection of the following:
What driver shall I use…?
Also, what power supply ?
Is this difficult to achieve?
Thanks
Zakaria