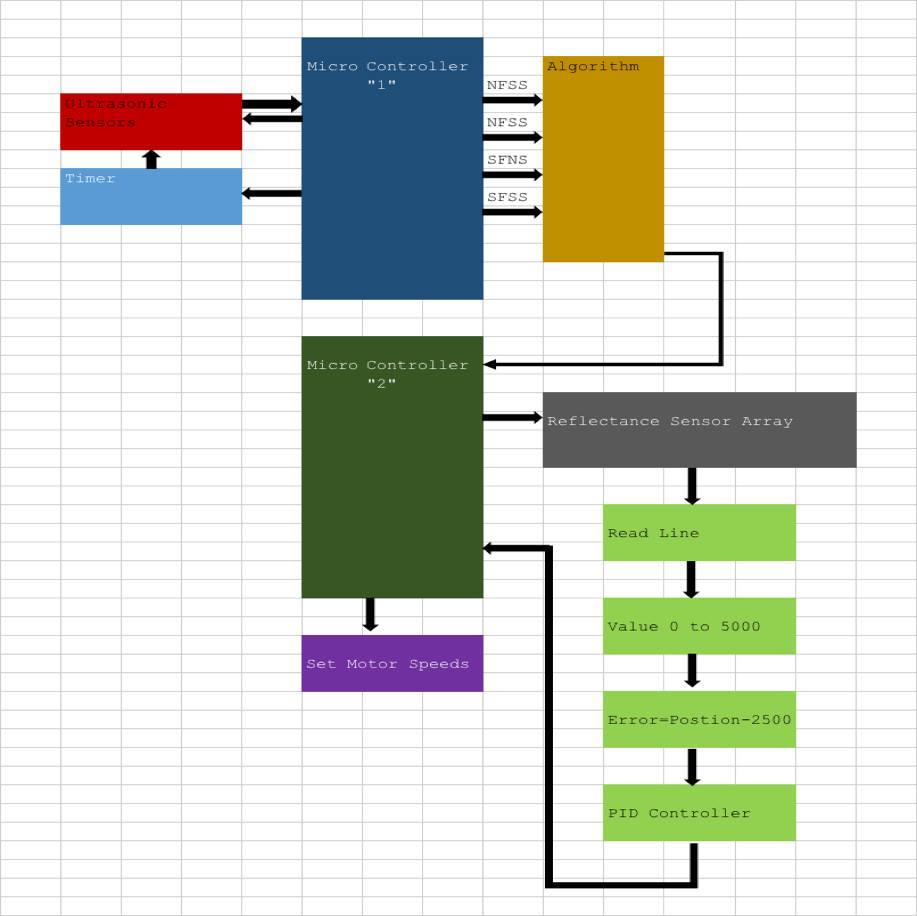
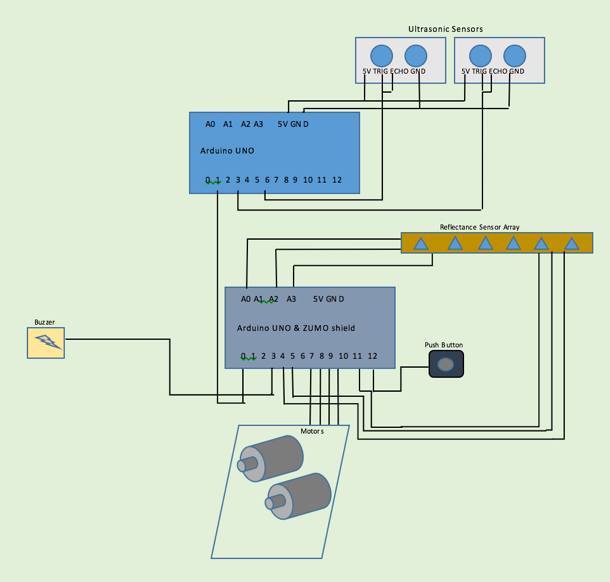
This system used two Arduino UNOs to interface multiple position sensors, and communicated with the autonomous vehicle. This simulation included an Arduino ZUMO robot that received interfaced sensor data from another microcontroller via the serial communication interface SCI.
I moved your post to the Share Your Projects section of our forum, since it seemed more appropriate.
Thank you for sharing the lane changing robot with us. It looks like it works well! Do you have any other videos or pictures, or a writeup somewhere online that shows more about how it was made?
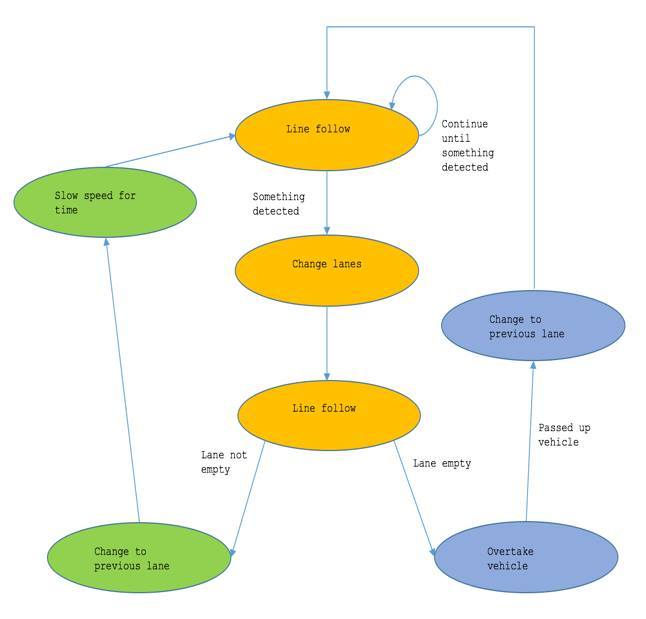
Hi Claire, thanks for moving this to Share Your Projects. I might of posted it in the wrong location on purpose . I uploaded the corresponding block diagram, circuit diagram, and state diagram for the video above.
It looks good in the videos, but there are major limitations with real-time position sensor use.
Long straight aways make the position sensors false positive prone.
The sensors are always looking forward and cannot sensor while turning.
The shorter the track, the less time the Zumo has to complete its task
Tesla actually uses position sensor on their cars too. I suspect clever use of sound frequencies.
This project is built upon Zumo libraries and the New Ping library. The reason I used two micro controllers is the Zumo acted funky when an extra timer was used to interface the sensors. It could of been the $5 Inland Arduino UNO. It was slightly annoying to disconnect the serial communication every time I needed to upload code.
Since its completion, this project has become a little more robust and accounts for a variety of situations. By the way, I did this project for a Electrical Engineering senior design. The Zumo was a pretty good (kind of expensive" choice. The double Arduino and acrylic sandwich might be a good design feature for the future Zumo.


 . I uploaded the corresponding block diagram, circuit diagram, and state diagram for the video above.
. I uploaded the corresponding block diagram, circuit diagram, and state diagram for the video above.