
Hello all,
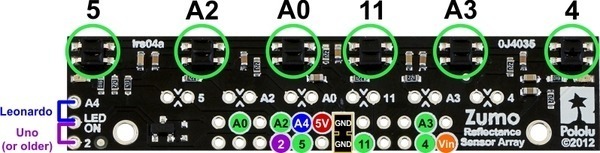
I got two Zumo’s in the mail. Other than some frustration over the jumpers and problems soldering the and desoldering the battery and motor leads it was fairly painless. I did have one question about the Zumo reflectance Sensor Array though. After soldering it on to my first bot and playing around it seems to be that only 12 pins are needed for the whole array, but it takes up 24 pins of I/O. Based on the following picture, I was thinking I might be able to remove the pins from the headers…
Question one. . .
If I were to use wire cutters to remove the other 12 pins would this cause a problem? I would like to use them for a sensor or something.
Question Two. . .
The second question might be a personal opinion. Is sonar preferred over optical for sumo target acquisition? If so why?
It seems the sonar sensors have better range but less accuracy, while the optical sensors are opposite. Is there a lag issue with sonar? It seems to be the way to go, but I see most people using optical for sumo opponent tracking. I was wondering if there was a reason.
Thank in advance for any help you can provide…
OmegaNine