Greetings,
The default processor board for the ‘Zumo Robot Kit for Arduino’ (https://www.pololu.com/catalog/product/2505) is of course the original Arduino board.
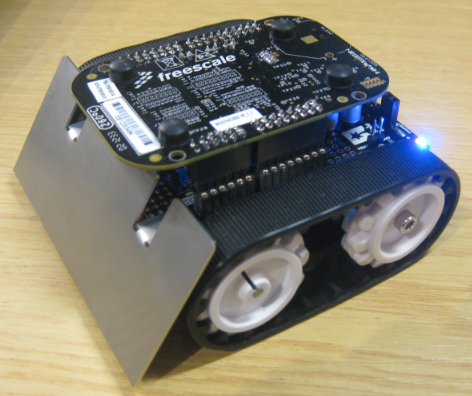
Because I wanted to use an ARM Cortex-M0+ for my project, I combined the Zumo Shield with the Freescale FRDM-KL25Z board:
PS: The main challenge was to adopt the hardware to work nicely with the 3.3V logic levels of the FRDM-KL25Z board.
It would be great if Pololu could consider to add a feature to support 3.3V on the Zumo Reflectance Array (pololu.com/catalog/product/961)?
By the way, the Zumo Reflectance Array should have worked without any modifications. Could you please tell me what made you believe a change was necessary and what changes you made?
Hi Derril,
The changes are described in mcuoneclipse.com/2013/02/08/zumo … rdm-kl25z/
There is one thing which is related to the FRDM-KL25Z board: it does not generate the needed 5V for the shield from the battery voltage, so I had to add a voltage converter to the shield.
The other thing is that D4 on the reflectance array is connected to the NMI (Non Maskable Interrupt) line of the FRDM board: while it is possible to disable NMI in the startup code of the Cortex-M0+, because there is no pull-up on the sensor line, it could cause a NMI on the processor. So I re-routed that pin as supported by the reflectance sensor array.
The two above things are related to the FRDM board, and not a problem of the Zumo shield. But would be great if for example there would be traces on the board to make the add-on of the voltage generator easier.
The other thing is that the FRDM-KL25Z board has 3.3V voltage levels. The sensor array has 5V, and while some input pins are 5V tolearant, and to make the sensor response faster. Here again it would be great if 3.3V operation would be possible on the reflectance array (similar what is possible with the normal 8-sensor array you have in your shop which I use for other projects).
Many thanks to the Pololu team, and keep the excellent work going!
Erich
Thank you for sharing the maze solver, that looks really cool!
As I mentioned before, the reflectance sensor should work fine at 3.3V; there is nothing 5V-specific about it. This is unlike our QTR Sensors, where the LEDs are intended to be powered off of 5V. You should not have to modify the Zumo Reflectance Array; what makes you believe that you needed to modify it, and what modifications did you make?
Hi Derrill,
the concern is about the 5V supply on the capacitor side for the output signal. This means that there can be a 5V signal to a microcontroller only having a 3.3V input level. With not having 5V tolerant input pins, that’s an issue. So I need a 0V to 3.3V ouput signal.
I hope this clarifies the need for a 3.3V modification.
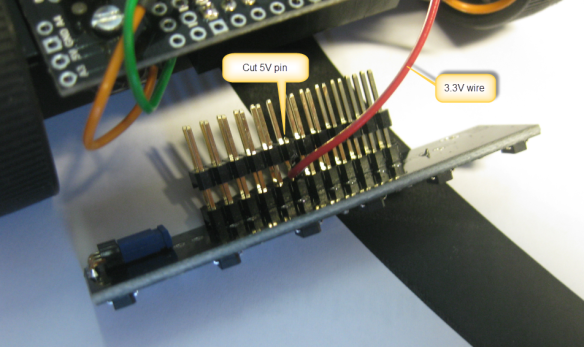
So instead supplying 5V to the sensor array, I have cut that 5V supply pin to the sensor array, and wired it to get 3.3V.
With this, the capacitor was charged up to 3.3V, and I had a 3.3V to 0V signal as needed for the 3.3V input pins.
I have to say that on some ARM cores some (but not all!) pins can be 5V tolerant. To be on the save side, it is better to have a clean 3.3V solution for 3.3V logic levels.
Hello,
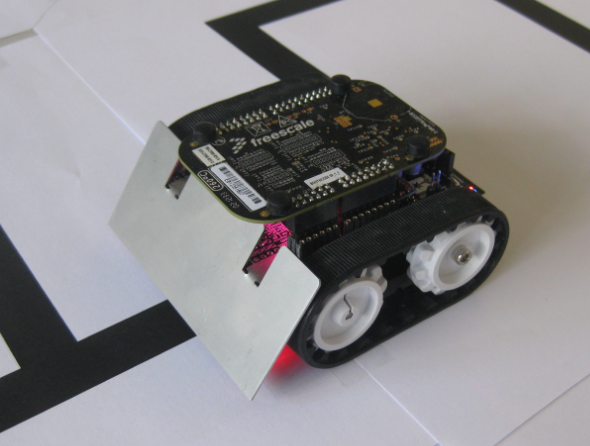
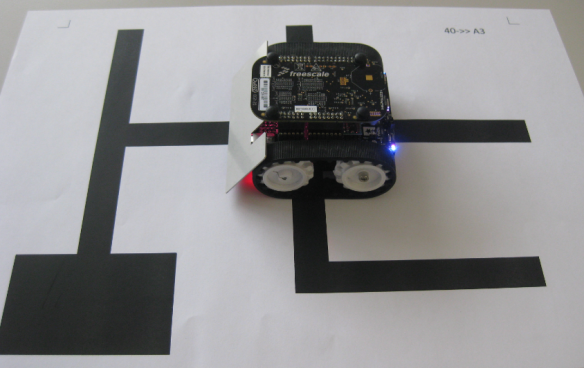
the maze solving Zumo robot has been extended: it is now much faster, it can drive from the finish to the start point, and it drives backwards from a dead-end.
Video is on mcuoneclipse.com/2013/03/28/maze … -backward/