Hello,
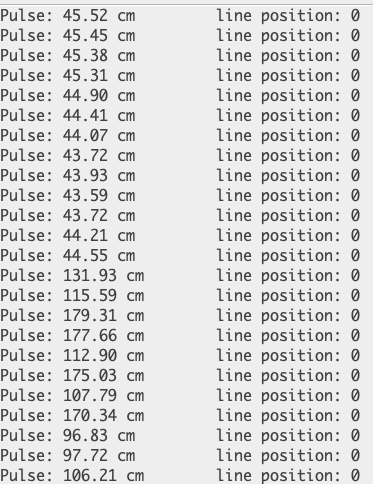
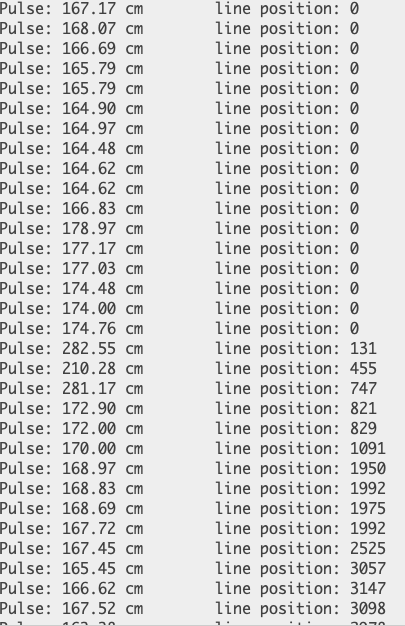
I’m using a Zumo Shield robot with HCSR04 sensors. When I try the LineFollower, BorderDetect, etc. examples with Zumo Shield it’s working as expected. For the sensors when I try the example UltrasonicSensorExample, I’m able to read the distance as expected. The problem starts when I try to unite these LineFollower and Sensor together. My robot follows the line, it stops when it sees an object 10cm ahead of it. The problem is that it’s vibrating while it’s moving. I’m not sure “vibrating” is the right word for it but in any case I couldn’t find anything online for this problem. I’ve included a video of it here: IMG_1214
Any help would be appreciate. Here’s the code I’m using as well:
#include <Wire.h>
#include <ZumoShield.h>
ZumoBuzzer buzzer;
ZumoReflectanceSensorArray reflectanceSensors;
ZumoMotors motors;
Pushbutton button(ZUMO_BUTTON);
int lastError = 0;
// This is the maximum speed the motors will be allowed to turn.
// (400 lets the motors go at top speed; decrease to impose a speed limit)
const int MAX_SPEED = 200;
// Pins
const int TRIG_PIN = A4;
const int ECHO_PIN = A5;
// Anything over 400 cm (23200 us pulse) is "out of range"
const unsigned int MAX_DIST = 580;
void setup()
{
// Play a little welcome song
buzzer.play(">g32>>c32");
// Initialize the reflectance sensors module
reflectanceSensors.init();
// Wait for the user button to be pressed and released
button.waitForButton();
// Turn on LED to indicate we are in calibration mode
pinMode(13, OUTPUT);
digitalWrite(13, HIGH);
// The Trigger pin will tell the sensor to range find
pinMode(TRIG_PIN, OUTPUT);
digitalWrite(TRIG_PIN, LOW);
pinMode(ECHO_PIN, INPUT);
// Wait 1 second and then begin automatic sensor calibration
// by rotating in place to sweep the sensors over the line
delay(1000);
int i;
for(i = 0; i < 80; i++)
{
if ((i > 10 && i <= 30) || (i > 50 && i <= 70))
motors.setSpeeds(-200, 200);
else
motors.setSpeeds(200, -200);
reflectanceSensors.calibrate();
// Since our counter runs to 80, the total delay will be
// 80*20 = 1600 ms.
delay(20);
}
motors.setSpeeds(0,0);
// Turn off LED to indicate we are through with calibration
digitalWrite(13, LOW);
buzzer.play(">g32>>c32");
// Wait for the user button to be pressed and released
button.waitForButton();
// Play music and wait for it to finish before we start driving.
buzzer.play("L16 cdegreg4");
while(buzzer.isPlaying());
}
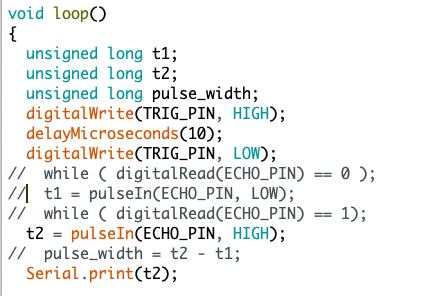
void loop()
{
unsigned long t1;
unsigned long t2;
unsigned long pulse_width;
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
while ( digitalRead(ECHO_PIN) == 0 );
t1 = micros();
while ( digitalRead(ECHO_PIN) == 1);
t2 = micros();
pulse_width = t2 - t1;
unsigned int sensors[6];
int position = reflectanceSensors.readLine(sensors, QTR_EMITTERS_ON, 1);
int error = position - 2500;
int speedDifference = error / 4 + 6 * (error - lastError);
lastError = error;
int m1Speed = MAX_SPEED + speedDifference;
int m2Speed = MAX_SPEED - speedDifference;
int i;
if (pulse_width >= MAX_DIST) {
if (m1Speed < 0)
m1Speed = 0;
if (m2Speed < 0)
m2Speed = 0;
if (m1Speed > MAX_SPEED)
m1Speed = MAX_SPEED;
if (m2Speed > MAX_SPEED)
m2Speed = MAX_SPEED;
motors.setSpeeds(m1Speed, m2Speed);
}
else if (pulse_width <= MAX_DIST)
motors.setSpeeds(0, 0);
// for(i = 0; i < 40; i++) {
// if (i> 0 && i <= 30)
// motors.setSpeeds(-200,200);
// else
// motors.setSpeeds(200,200);
// }
}