Hello Everyone,
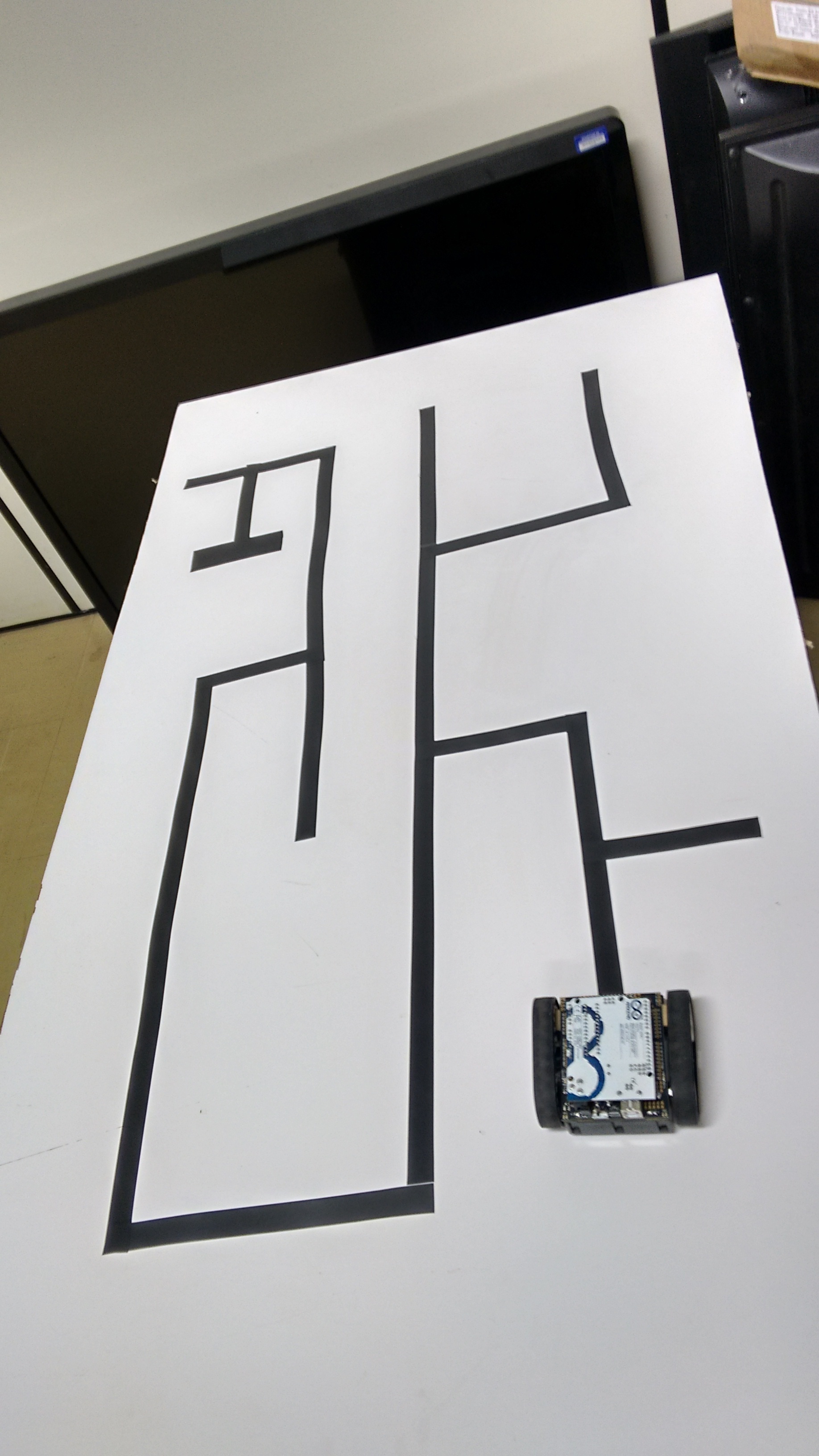
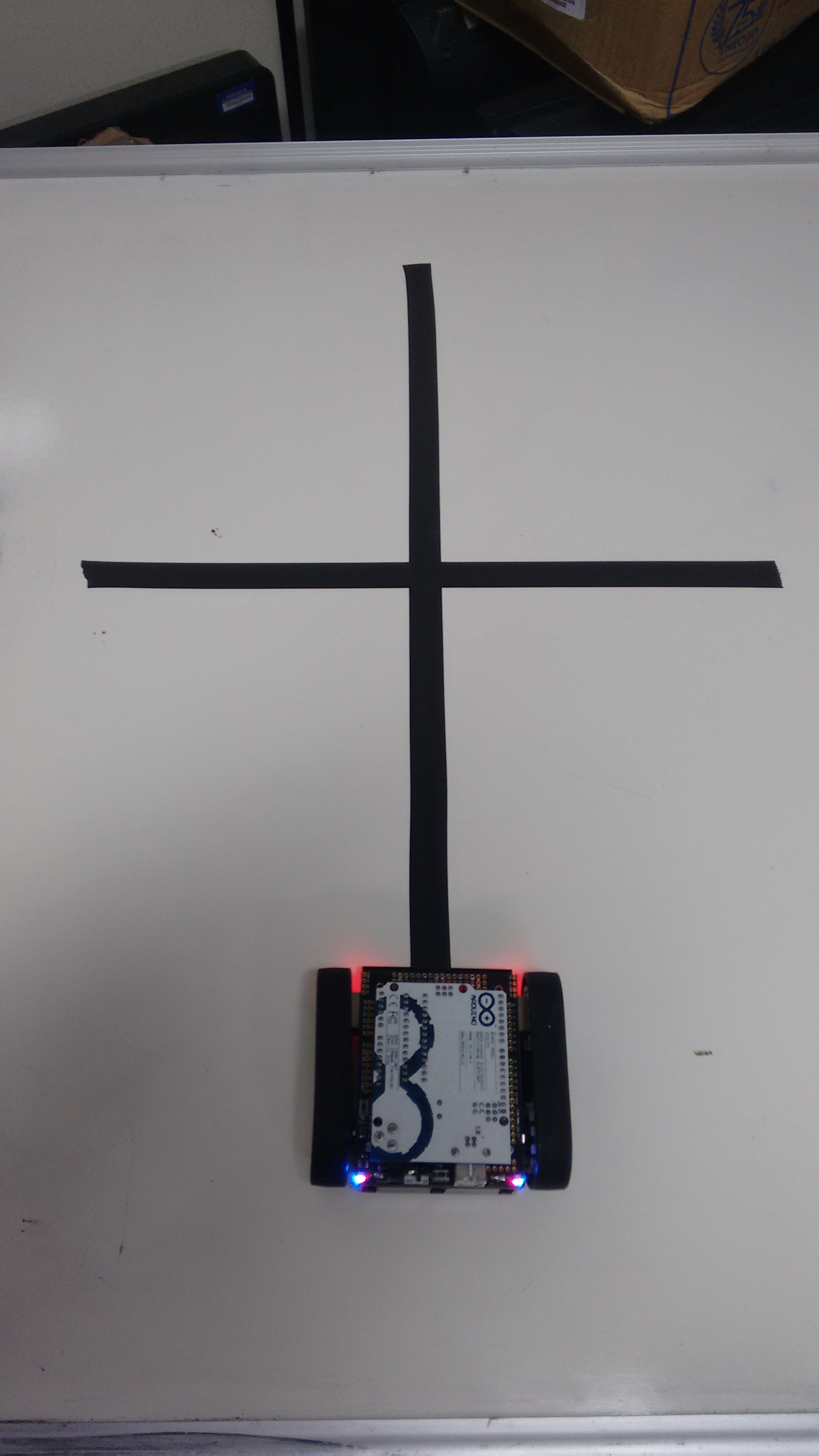
I am using the example for maze solver. Somehow my zumo robot will stop at intersections… Is anyone else having this problem. How can i fix this? Do i need to adjust INCHES_TO_ZUNITS? Higher or lower on ZUNITS?
#include <QTRSensors.h>
#include <ZumoReflectanceSensorArray.h>
#include <ZumoMotors.h>
#include <ZumoBuzzer.h>
#include <Pushbutton.h>
/* This example uses the Zumo Reflectance Sensor Array
* to navigate a black line maze with no loops. This program
* is based off the 3pi maze solving example which can be
* found here:
*
* https://www.pololu.com/docs/0J21/8.a
*
* The Zumo first calibrates the sensors to account
* for differences of the black line on white background.
* Calibration is accomplished in setup().
*
* In loop(), the function solveMaze() is called and navigates
* the Zumo until it finds the finish line which is defined as
* a large black area that is thick and wide enough to
* cover all six sensors at the same time.
*
* Once the Zumo reaches the finishing line, it will stop and
* wait for the user to place the Zumo back at the starting
* line. The Zumo can then follow the shortest path to the finish
* line.
*
* The macros SPEED, TURN_SPEED, ABOVE_LINE(), and LINE_THICKNESS
* might need to be adjusted on a case by case basis to give better
* line following results.
*/
// SENSOR_THRESHOLD is a value to compare reflectance sensor
// readings to to decide if the sensor is over a black line
#define SENSOR_THRESHOLD 300
// ABOVE_LINE is a helper macro that takes returns
// 1 if the sensor is over the line and 0 if otherwise
#define ABOVE_LINE(sensor)((sensor) > SENSOR_THRESHOLD)
// Motor speed when turning. TURN_SPEED should always
// have a positive value, otherwise the Zumo will turn
// in the wrong direction.
#define TURN_SPEED 200
// Motor speed when driving straight. SPEED should always
// have a positive value, otherwise the Zumo will travel in the
// wrong direction.
#define SPEED 200
// Thickness of your line in inches
#define LINE_THICKNESS .75
// When the motor speed of the zumo is set by
// motors.setSpeeds(200,200), 200 is in ZUNITs/Second.
// A ZUNIT is a fictitious measurement of distance
// and only helps to approximate how far the Zumo has
// traveled. Experimentally it was observed that for
// every inch, there were approximately 17142 ZUNITs.
// This value will differ depending on setup/battery
// life and may be adjusted accordingly. This value
// was found using a 75:1 HP Motors with batteries
// partially discharged.
#define INCHES_TO_ZUNITS 17142
// When the Zumo reaches the end of a segment it needs
// to find out three things: if it has reached the finish line,
// if there is a straight segment ahead of it, and which
// segment to take. OVERSHOOT tells the Zumo how far it needs
// to overshoot the segment to find out any of these things.
#define OVERSHOOT(line_thickness)(((INCHES_TO_ZUNITS * (line_thickness)) / SPEED))
ZumoBuzzer buzzer;
ZumoReflectanceSensorArray reflectanceSensors;
ZumoMotors motors;
Pushbutton button(ZUMO_BUTTON);
// path[] keeps a log of all the turns made
// since starting the maze
char path[100] = "";
unsigned char path_length = 0; // the length of the path
void setup()
{
unsigned int sensors[6];
unsigned short count = 0;
unsigned short last_status = 0;
int turn_direction = 1;
buzzer.play(">g32>>c32");
reflectanceSensors.init();
delay(500);
pinMode(13, OUTPUT);
digitalWrite(13, HIGH); // turn on LED to indicate we are in calibration mode
button.waitForButton();
// Calibrate the Zumo by sweeping it from left to right
for(int i = 0; i < 4; i ++)
{
// Zumo will turn clockwise if turn_direction = 1.
// If turn_direction = -1 Zumo will turn counter-clockwise.
turn_direction *= -1;
// Turn direction.
motors.setSpeeds(turn_direction * TURN_SPEED, -1*turn_direction * TURN_SPEED);
// This while loop monitors line position
// until the turn is complete.
while(count < 2)
{
reflectanceSensors.calibrate();
reflectanceSensors.readLine(sensors);
if(turn_direction < 0)
{
// If the right most sensor changes from (over white space -> over
// line or over line -> over white space) add 1 to count.
count += ABOVE_LINE(sensors[5]) ^ last_status;
last_status = ABOVE_LINE(sensors[5]);
}
else
{
// If the left most sensor changes from (over white space -> over
// line or over line -> over white space) add 1 to count.
count += ABOVE_LINE(sensors[0]) ^ last_status;
last_status = ABOVE_LINE(sensors[0]);
}
}
count = 0;
last_status = 0;
}
// Turn left.
turn('L');
motors.setSpeeds(0, 0);
// Sound off buzzer to denote Zumo is finished calibrating
buzzer.play("L16 cdegreg4");
// Turn off LED to indicate we are through with calibration
digitalWrite(13, LOW);
}
void loop()
{
// solveMaze() explores every segment
// of the maze until it finds the finish
// line.
solveMaze();
// Sound off buzzer to denote Zumo has solved the maze
buzzer.play(">>a32");
// The maze has been solved. When the user
// places the Zumo at the starting line
// and pushes the Zumo button, the Zumo
// knows where the finish line is and
// will automatically navigate.
while(1)
{
button.waitForButton();
goToFinishLine();
// Sound off buzzer to denote Zumo is at the finish line.
buzzer.play(">>a32");
}
}
// Turns according to the parameter dir, which should be
// 'L' (left), 'R' (right), 'S' (straight), or 'B' (back).
void turn(char dir)
{
// count and last_status help
// keep track of how much further
// the Zumo needs to turn.
unsigned short count = 0;
unsigned short last_status = 0;
unsigned int sensors[6];
// dir tests for which direction to turn
switch(dir)
{
// Since we're using the sensors to coordinate turns instead of timing them,
// we can treat a left turn the same as a direction reversal: they differ only
// in whether the zumo will turn 90 degrees or 180 degrees before seeing the
// line under the sensor. If 'B' is passed to the turn function when there is a
// left turn available, then the Zumo will turn onto the left segment.
case 'L':
case 'B':
// Turn left.
motors.setSpeeds(-TURN_SPEED, TURN_SPEED);
// This while loop monitors line position
// until the turn is complete.
while(count < 2)
{
reflectanceSensors.readLine(sensors);
// Increment count whenever the state of the sensor changes
// (white->black and black->white) since the sensor should
// pass over 1 line while the robot is turning, the final
// count should be 2
count += ABOVE_LINE(sensors[1]) ^ last_status;
last_status = ABOVE_LINE(sensors[1]);
}
break;
case 'R':
// Turn right.
motors.setSpeeds(TURN_SPEED, -TURN_SPEED);
// This while loop monitors line position
// until the turn is complete.
while(count < 2)
{
reflectanceSensors.readLine(sensors);
count += ABOVE_LINE(sensors[4]) ^ last_status;
last_status = ABOVE_LINE(sensors[4]);
}
break;
case 'S':
// Don't do anything!
break;
}
}
// This function decides which way to turn during the learning phase of
// maze solving. It uses the variables found_left, found_straight, and
// found_right, which indicate whether there is an exit in each of the
// three directions, applying the "left hand on the wall" strategy.
char selectTurn(unsigned char found_left, unsigned char found_straight,
unsigned char found_right)
{
// Make a decision about how to turn. The following code
// implements a left-hand-on-the-wall strategy, where we always
// turn as far to the left as possible.
if(found_left)
return 'L';
else if(found_straight)
return 'S';
else if(found_right)
return 'R';
else
return 'B';
}
// The maze is broken down into segments. Once the Zumo decides
// which segment to turn on, it will navigate until it finds another
// intersection. followSegment() will then return after the
// intersection is found.
void followSegment()
{
unsigned int position;
unsigned int sensors[6];
int offset_from_center;
int power_difference;
while(1)
{
// Get the position of the line.
position = reflectanceSensors.readLine(sensors);
// The offset_from_center should be 0 when we are on the line.
offset_from_center = ((int)position) - 2500;
// Compute the difference between the two motor power settings,
// m1 - m2. If this is a positive number the robot will turn
// to the left. If it is a negative number, the robot will
// turn to the right, and the magnitude of the number determines
// the sharpness of the turn.
power_difference = offset_from_center / 3;
// Compute the actual motor settings. We never set either motor
// to a negative value.
if(power_difference > SPEED)
power_difference = SPEED;
if(power_difference < -SPEED)
power_difference = -SPEED;
if(power_difference < 0)
motors.setSpeeds(SPEED + power_difference, SPEED);
else
motors.setSpeeds(SPEED, SPEED - power_difference);
// We use the inner four sensors (1, 2, 3, and 4) for
// determining whether there is a line straight ahead, and the
// sensors 0 and 5 for detecting lines going to the left and
// right.
if(!ABOVE_LINE(sensors[0]) && !ABOVE_LINE(sensors[1]) && !ABOVE_LINE(sensors[2]) && !ABOVE_LINE(sensors[3]) && !ABOVE_LINE(sensors[4]) && !ABOVE_LINE(sensors[5]))
{
// There is no line visible ahead, and we didn't see any
// intersection. Must be a dead end.
return;
}
else if(ABOVE_LINE(sensors[0]) || ABOVE_LINE(sensors[5]))
{
// Found an intersection.
return;
}
}
}
// The solveMaze() function works by applying a "left hand on the wall" strategy:
// the robot follows a segment until it reaches an intersection, where it takes the
// leftmost fork available to it. It records each turn it makes, and as long as the
// maze has no loops, this strategy will eventually lead it to the finish. Afterwards,
// the recorded path is simplified by removing dead ends. More information can be
// found in the 3pi maze solving example.
void solveMaze()
{
while(1)
{
// Navigate current line segment
followSegment();
// These variables record whether the robot has seen a line to the
// left, straight ahead, and right, while examining the current
// intersection.
unsigned char found_left = 0;
unsigned char found_straight = 0;
unsigned char found_right = 0;
// Now read the sensors and check the intersection type.
unsigned int sensors[6];
reflectanceSensors.readLine(sensors);
// Check for left and right exits.
if(ABOVE_LINE(sensors[0]))
found_left = 1;
if(ABOVE_LINE(sensors[5]))
found_right = 1;
// Drive straight a bit more, until we are
// approximately in the middle of intersection.
// This should help us better detect if we
// have left or right segments.
motors.setSpeeds(SPEED, SPEED);
delay(OVERSHOOT(LINE_THICKNESS)/2);
reflectanceSensors.readLine(sensors);
// Check for left and right exits.
if(ABOVE_LINE(sensors[0]))
found_left = 1;
if(ABOVE_LINE(sensors[5]))
found_right = 1;
// After driving a little further, we
// should have passed the intersection
// and can check to see if we've hit the
// finish line or if there is a straight segment
// ahead.
delay(OVERSHOOT(LINE_THICKNESS)/2);
// Check for a straight exit.
reflectanceSensors.readLine(sensors);
// Check again to see if left or right segment has been found
if(ABOVE_LINE(sensors[0]))
found_left = 1;
if(ABOVE_LINE(sensors[5]))
found_right = 1;
if(ABOVE_LINE(sensors[1]) || ABOVE_LINE(sensors[2]) || ABOVE_LINE(sensors[3]) || ABOVE_LINE(sensors[4]))
found_straight = 1;
// Check for the ending spot.
// If all four middle sensors are on dark black, we have
// solved the maze.
if(ABOVE_LINE(sensors[1]) && ABOVE_LINE(sensors[2]) && ABOVE_LINE(sensors[3]) && ABOVE_LINE(sensors[4]))
{
motors.setSpeeds(0,0);
break;
}
// Intersection identification is complete.
unsigned char dir = selectTurn(found_left, found_straight, found_right);
// Make the turn indicated by the path.
turn(dir);
// Store the intersection in the path variable.
path[path_length] = dir;
path_length++;
// You should check to make sure that the path_length does not
// exceed the bounds of the array. We'll ignore that in this
// example.
// Simplify the learned path.
simplifyPath();
}
}
// Now enter an infinite loop - we can re-run the maze as many
// times as we want to.
void goToFinishLine()
{
unsigned int sensors[6];
int i = 0;
// Turn around if the Zumo is facing the wrong direction.
if(path[0] == 'B')
{
turn('B');
i++;
}
for(;i<path_length;i++)
{
followSegment();
// Drive through the intersection.
motors.setSpeeds(SPEED, SPEED);
delay(OVERSHOOT(LINE_THICKNESS));
// Make a turn according to the instruction stored in
// path[i].
turn(path[i]);
}
// Follow the last segment up to the finish.
followSegment();
// The finish line has been reached.
// Return and wait for another button push to
// restart the maze.
reflectanceSensors.readLine(sensors);
motors.setSpeeds(0,0);
return;
}
// simplifyPath analyzes the path[] array and reduces all the
// turns. For example: Right turn + Right turn = (1) Back turn.
void simplifyPath()
{
// only simplify the path if the second-to-last turn was a 'B'
if(path_length < 3 || path[path_length - 2] != 'B')
return;
int total_angle = 0;
int i;
for(i = 1; i <= 3; i++)
{
switch(path[path_length - i])
{
case 'R':
total_angle += 90;
break;
case 'L':
total_angle += 270;
break;
case 'B':
total_angle += 180;
break;
}
}
// Get the angle as a number between 0 and 360 degrees.
total_angle = total_angle % 360;
// Replace all of those turns with a single one.
switch(total_angle)
{
case 0:
path[path_length - 3] = 'S';
break;
case 90:
path[path_length - 3] = 'R';
break;
case 180:
path[path_length - 3] = 'B';
break;
case 270:
path[path_length - 3] = 'L';
break;
}
// The path is now two steps shorter.
path_length -= 2;
}Thank You For All Your Help
Jordan V