
Hello,
I was wondering if anyone has experienced vibrational noise problems with the Zumo robot body. I’m using the MiniIMU-9v2 with full-scale deflection setting set to +/-2G and data rate of 100Hz [reg 0x20 = 0x57, reg 0x23 = 0x08, and remaining registers are default values]. I have the accelerometer positioned so the z-axis is vertical and I’m capturing the y-axis, which is parallel with the wheel treads and perpendicular to the ground.
What happens is, whenever I try to capture acceleration values while the wheels are rotating there’s a huge amount of noise-- peak-peak of almost a full 1G. See chart below (sorry about lack of labels, I’m switching over from Matlab to Anaconda and I’m still not very comfortable with Python)
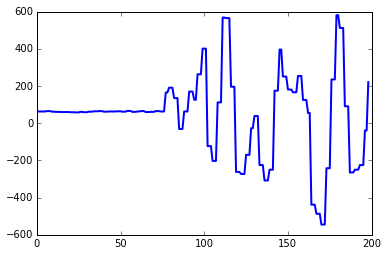
The period before sample #75 is with motors off, and motors turned on to half-speed at sample #75. The robot is sitting on a paperclip holder so there’s no movement, just the treads spinning in air.
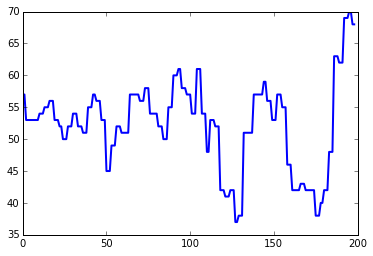
I first thought it might be electrical noise, because the battery pack on the Zumo is powering the motors directly and the 3.3V regulator that powers the accelerometer. But after disconnecting the accelerometer completely from the Zumo, ie holding it while the wheels spin, I get the following data (this time, sorry for the scaling not matching previous graph). There looks to be some added noise while the motors are spinning, but it’s too tough for me to tell by eye if it’s more noise than when the motors were not spinning.
Any feedback or suggestions are appreciated.
Cheers,
Brian