
For my projects with the Zumo chassis I need position encoders.
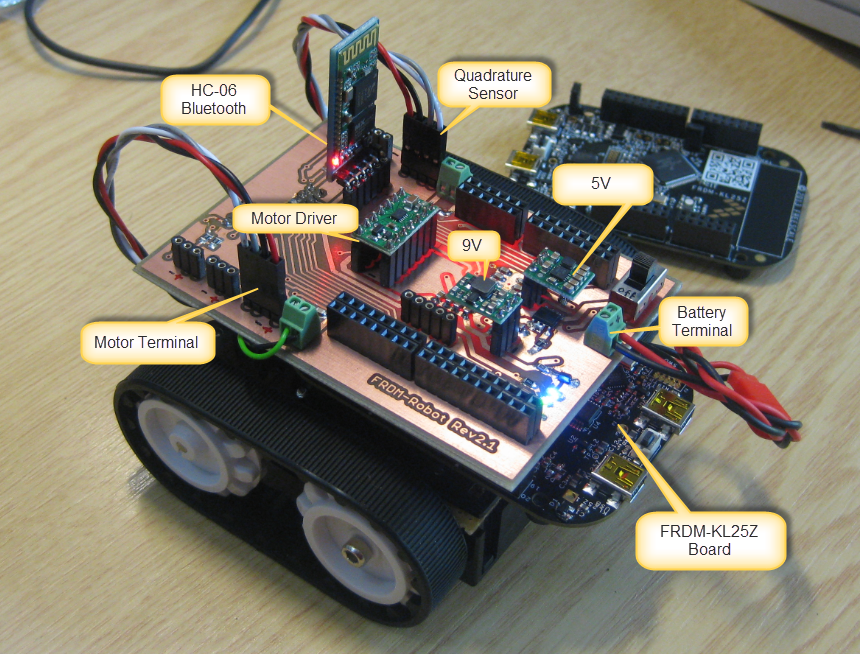
So I have modified the Zumo and added two Pololu optical quadrature encoders:
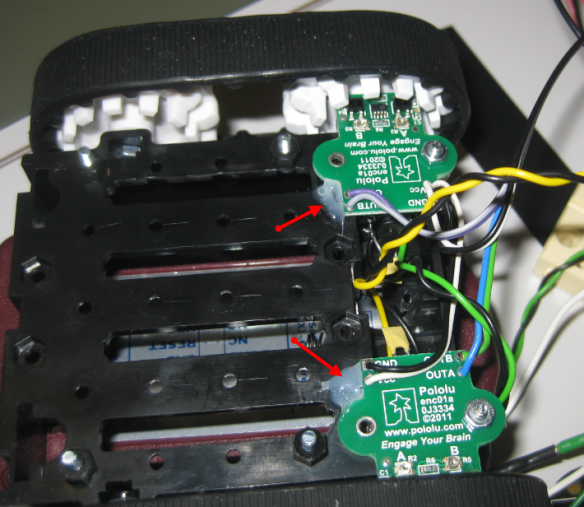
Details and more pictures are posted here:
http://mcuoneclipse.com/2013/06/15/adding-quadrature-encoder-to-the-zumo-chassis/
including instructions how to recalibrate the sensors for 3.3V, as I’m using an ARM Cortex-M0+ with 3.3V logic levels.
Happy Zumoing ![]()