
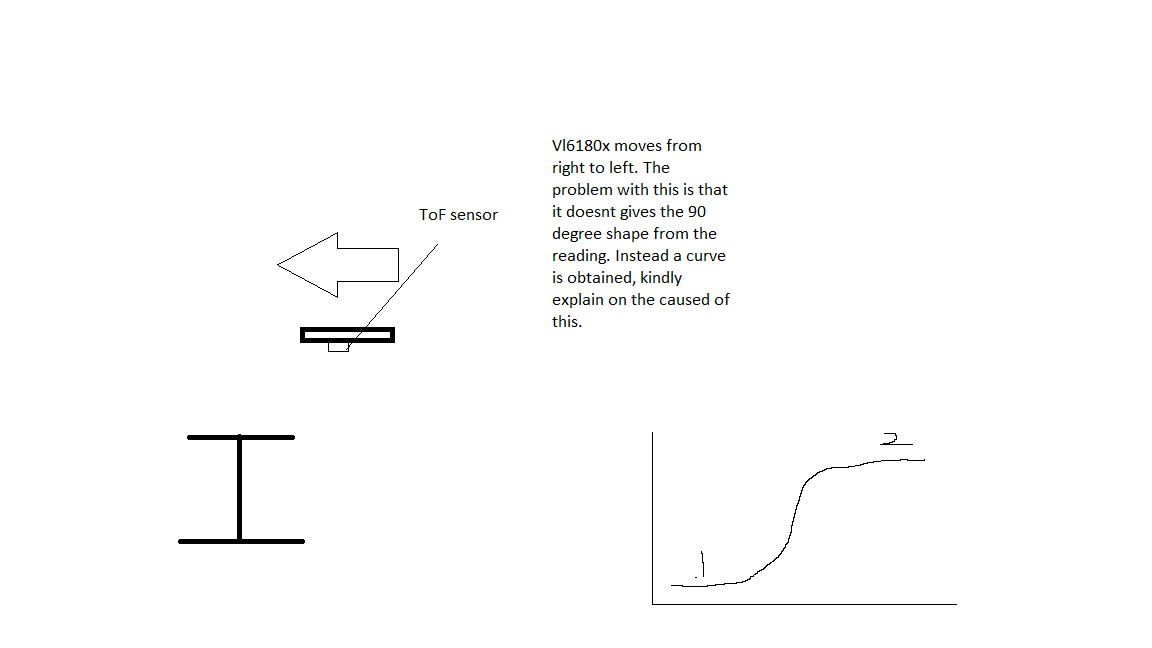
Referring to the figure, i’m running a tof sensor to scan through an object (from point 1 to point 2) where the output should be a 90 degree square wave instead of a curve. Kindly advise on how to improve the particular experiment using this sensor.
The curve you are getting does not seem unreasonable and it is likely happening because of the field of view of the VL6180X, which detects objects in a cone in front of it, not a line. You might try comparing the reading against a certain distance threshold in your application to decide if the object is there.
-Jon
Thanks for the prompt reply. Will it improve with the change in orientation (aligning the emitter and receiver perpendicular to the scanning direction)? Also there’s alot of “noise” reading i would say, anyway where i can reduce those?
Yes, we expect aligning the sensor perpendicular to the plane of the surface you are sensing to be ideal. As for noise, one way to reduce that is by increasing the number of averaging samples via the READOUT__AVERAGING_SAMPLE_PERIOD register. You can learn more about how to do that under the “Range Sensor” section of the VL6180X’s datasheet, which you can find under the Resources tab of our VL6180X product page. In addition to (or instead of) modifying that register, you could perform some kind of software averaging or filtering with whatever device you are using to read the VL6180X.
-Jon