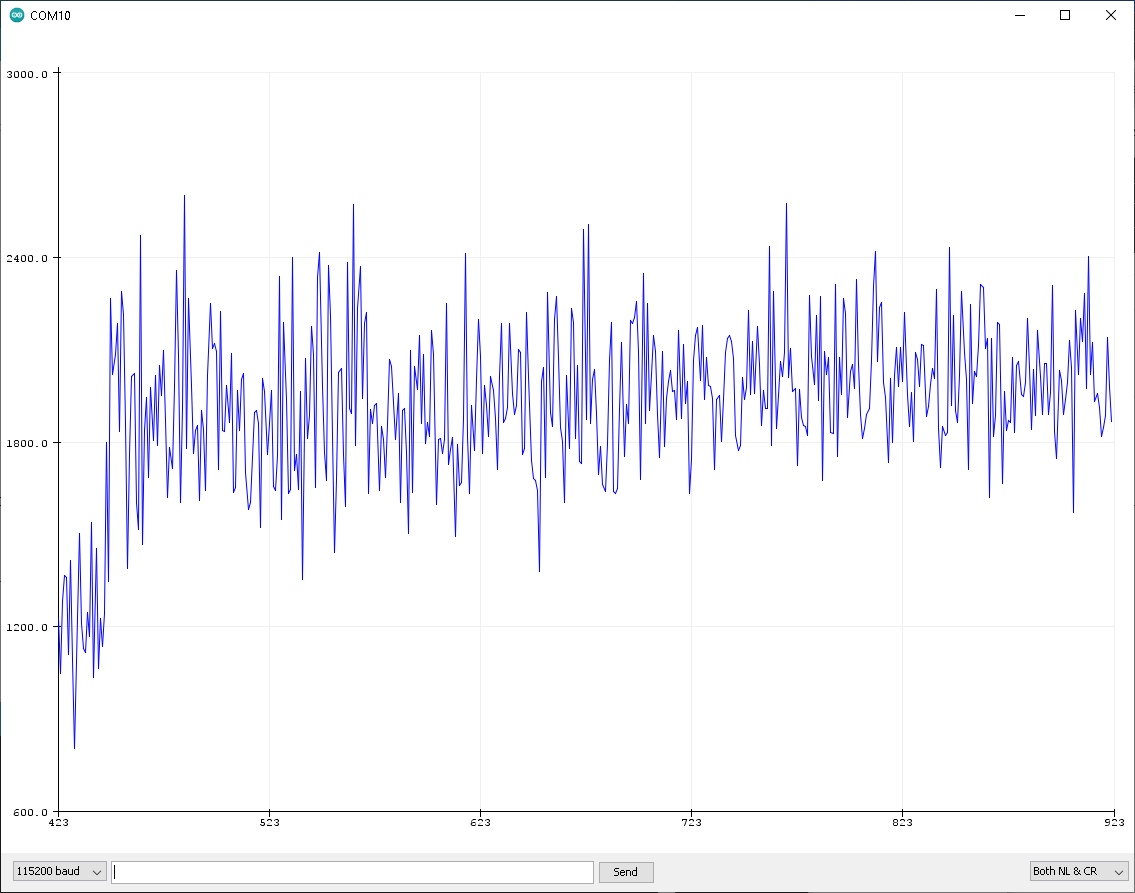
I am running the example sketch for the VL53L1X sensor and am getting an extremely noisey result when I point it at walls in my office:
It seems to get the right distance if averaged, but the noise is huge. I tried it on an esp8266 and a mega2560. Is there something you can recommend to fix this?
Hello.
There are several factors that can impact the quality of the VL53L1X sensors readings such as the ambient light levels, characteristics of the target surface (color, angle relative to the sensor, IR reflectivity), the typical target distance, and various sensor settings. If you have not already, I suggest looking through the senor datasheet (available on the product page under the “Resources” tab) and other application notes and manuals from the manufacturer, ST since you can get a better idea about how some of these factors affect the sensor from those documents.
Does the extreme noise go away if you test the sensor with a closer target or if you test it in a dark space? Can you post a sample output using the ContinuousWithDetails.ino example program from our Arduino library along with some pictures of your setup that show all of your connections and the test environment?
As mentioned in the product page description, configuring the sensor with lower sampling rates and longer timing budgets typically improves performance. There are functions in our library that make it easy to adjust the timing budget, so that is something you could play with fairly easily to see if it helps clean up the noise.
- Patrick
I have a VL53L0X sensor that works fine with multiple boards and libraries with very little noise. I think the sensor is defective. It’s possible it was damaged when I soldered it as the sensor is very close to the row of header pins. I saw what appeared to be smudges on the sensor windows and tried to clean them with some alcohol and cleaning sticks. Could this have damaged the sensor?
This may seem silly, but just to confirm, did you remove the protective liner from the sensor IC? Smudges on the sensor IC could definitely be a problem, and I am not sure about your method for trying to clean that. Can you post some close up pictures of your board?
Just to clarify, are you saying that you currently get better performance from the VL53L0X than the VL53L1X in the same setup and environment? How much noise do you see from a VL53L0X and the VL53L1X if you hold a white target (like a piece of paper) approximately 10 cm from the board?
- Patrick
Alright I have to come forward the sensor is not a Pololu sensor but my VL53L0X is. The cover is removed. I tried using Pololu and Sparkfun libraries with the VL53L1X, they give the same output. The 0X works fine with similar libraries, aiming it at the same targets (walls). I believe the 1X is not functioning correctly. If I reduce the distance to ~<.5m it stabilizes.
We would not expect the VL53L1X and the VL53L0X to have such different results in the same environment in that range if you are using the default settings from our library, so it is possible the noise issues you are having stems from some problem with your sensor board. We cannot offer support for a board we did not make, but if you decide to try one of our VL53L1X carriers and see the same results, then please post some pictures of your setup and some sample outputs with a long distance target (like in your original post) and a short distance target (e.g. around 10 cm from the board).
- Patrick