Hi, I’m trying the VL53L1 sensor from ST and the datasheet says the angle of Field Of View can be 27°.
I’m doing some measurements, fixed the module on the roof, and measuring various parameters like Timing Budget, dark conditions, black or white obstacles, black or white ground… So, with 220 cm from the ground to roof, I can not go beyond 15° of Field of View with a ROI window 16x16.
Anyone has tried this too ? Maybe is there a parameter I did not see in the datasheet ? Please help
Are you using our carrier board for the sensor? Does the sensor have a larger field of vision at a shorter range? What library are you using with the sensor? Also, to be clear, the sensor should see about 27° edge to edge (so 13.5° in any direction out from the center).
I made a pcb with the VL53L1 and an Atmega328p, I use the arduino library “vl53l1x-st-api”.
I can set ROI using VL53L1_SetUserROI function, it works fine so I can define various windows from 4x4 to 16x16, but I can not go beyond 15°. I tried with 130 cm, 220 cm, SHORT, MEDIUM, LONG ranges.
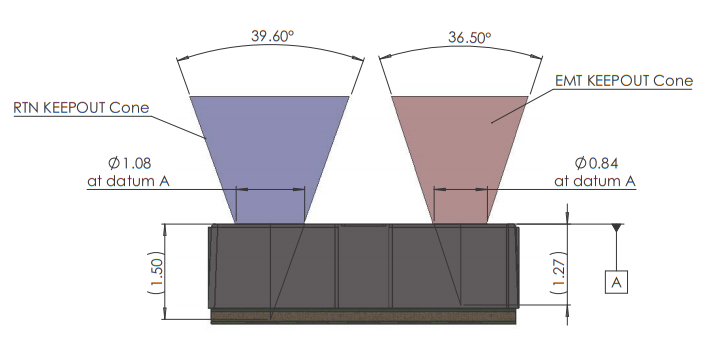
The angle you show in your “Mesure_Angles.png” file is half of the field of view. If you are measuring 15 degrees for that, then the field of vision is about 30 degrees, which seems about right for the sensor. Here is a figure from the VL53L1x datasheet that illustrates the sensor’s emitter and receiver keepout cones (which are a few degrees wider than the field of vision).
It seems like the setup shown in your diagram in the Mesure_Angles.png file is not ideal for estimating the field of vision. The surface of the table is directly in front of the sensor. I have done some previous experiments with the similar VL53L0x sensor and it seems that in some situations, that sensor will sense a more distant surface that is directly in front of the sensor (and returning more light) than a closer object at the periphery of the field of vision.
Do you intend to use the sensor to measure the height of objects on a table in your final application or are you just trying to characterize the sensor?