
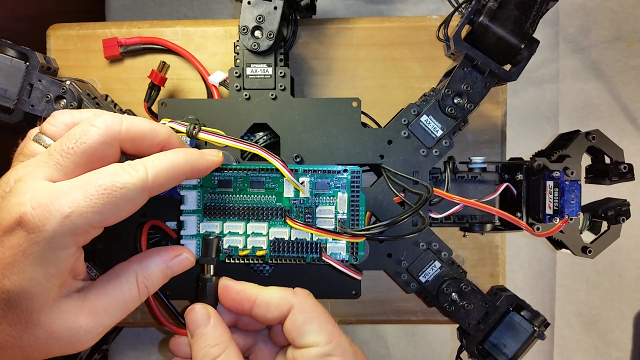
I just released a new video tutorial that shows how to control a Phantom hexapod robot with an Arduino Due and the DynamixShield. The DynamixShield is a product I am building that works with the Due to give you the ability to control Dynamixel smart servos, and it has a ton of Grove and RobotGeek connectors. Grove and RobotGeek are frameworks for robotics that allow you to purchase commercial modules and plug them in with a single cable.
In the video I show how to connect the shield to the robot and go over the details of the control sketch. It uses a Grove XBee socket for wireless communications to the joystick. I also added a gripper hand to the front of the robot and I show how to use it to pick things up with it.
If you liked the DynamixShield and would like to have one, then please support my Kickstarter campaign so I can get them produced and made available. I also have a stretch goal for modifying the PyPose/Nuke code so it can be used on the DynamixShield with other robot types.
Here is a link to the campaign: http://ctt.ec/087Uf+
And here is a direct link to the video: https://www.youtube.com/watch?v=odNNCJ3_NQo