
Hi thank you for the guidance. Finally, the address change has been achieved with a little modification on the code address_change_new_pololu.py (1.1 KB).
The change in address is viewed in the terminal as 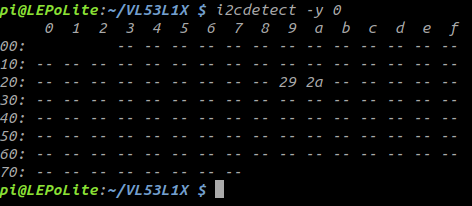
There are two instance has been created for the two sensor as you suggested, but when I tried to run the code, the two instances
tof1.start_ranging(3)
tof2.start_ranging(3)
reads the value from the single sensor and the another sensor remains unused, I’ve checked the connections and it is as same as mentioned above in this thread.
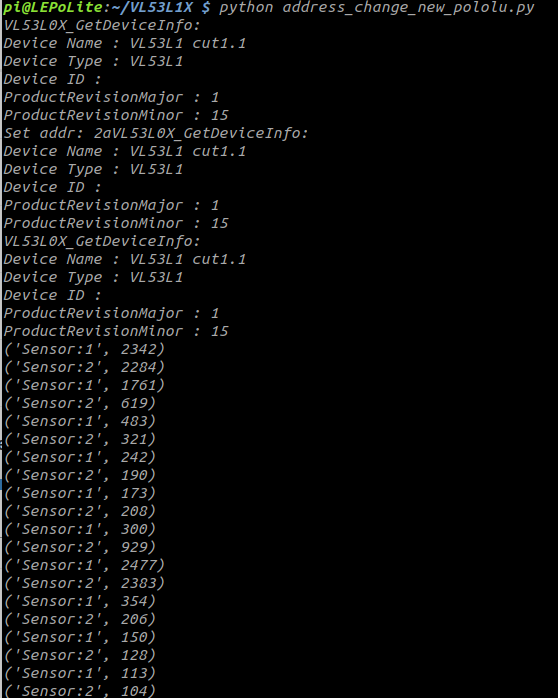
When the obstacle is placed in front of the single sensor, the value of the both sensors dropped. Both sensors are kept apart in a distance which could not interfere each other
When the hand was swang on the first sensor the results is:
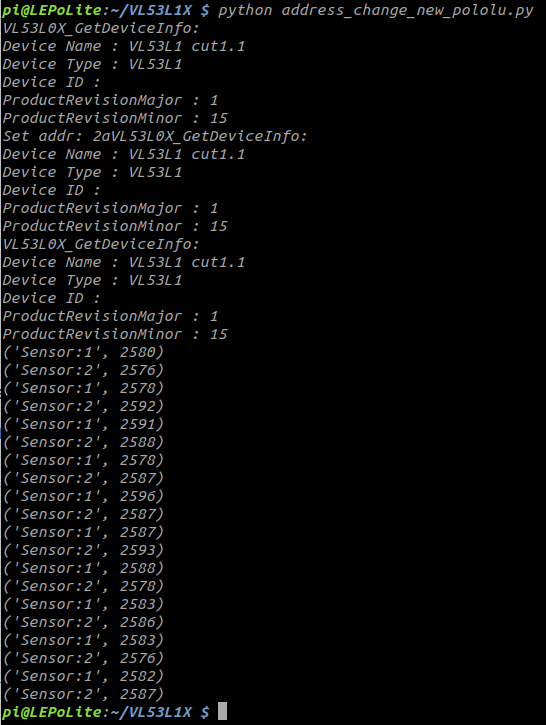
When it was swang on the second sensor the result is:
Help me to fix it.