
I am trying to use these ports, I know that I must unplug the jumpers, but and then, where should I connect my sensors? I need to connect them to a 5v and a GND port and the analog pins.
Hello.
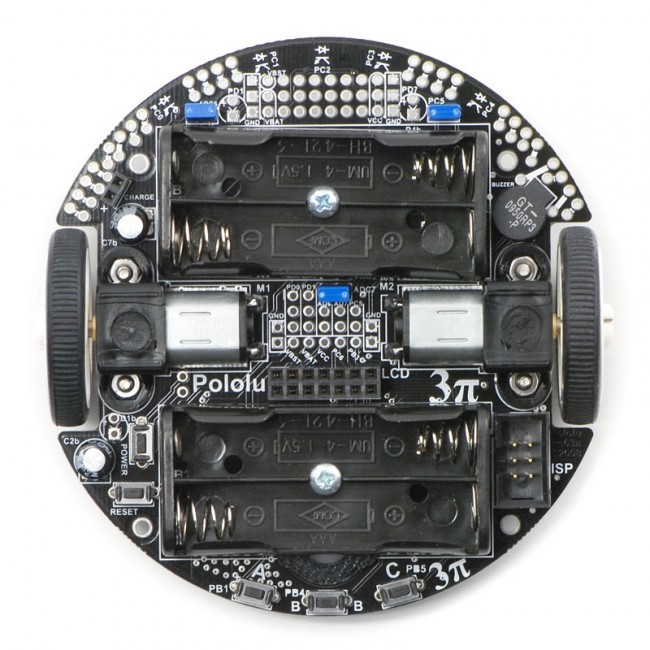
You can access those pins at several locations. The easiest place (that also has access to power) might be the headers between the motors. You can refer to the silkscreen on the board to see which headers connect to which pins. Another place the I/O pins can be accessed is at the jumpers you mentioned. You can use a multimeter (and the headers I mentioned above) to determine which of the two pins in each jumper is connected to which I/O pin on the microprocessor. Power connections are also available in the prototyping space at the front of the robot, though you would need to use jumper wires to bring the I/O pins there.
-Nathan