Hello everyone.
I wanted to post on Chrobotics forum, but I can’t seem to find any. :þ Seems that this is a good place to ask, though. Maybe someone had similar problem alrady.
So I’m trying to make CHR-UM6 working, and I have trouble with understanding its behaviour. Maybe I’ve missed something in the data sheet, I don’t know. I don’t think it’s the hardware problem, since communication generally seems to work, only that sometimes I’m getting packets with wrong checksums or the sensor reports “bad checksum” packet in response to my packets. I’ve made sure that there are no issues with my code, I also created some graphs on my oscilloscope to make sure that I really send what I mean to send.
What I do:
- I disable broadcast mode by writing to COMMUNICATION register.
- I write again to COMMUNICATION register, get OK from the sensor.
- write to MISC register, get OK.
- issue GET_FW_VERSION, get a “bad checksum” packet.
- issue GET_FW_VERSION again, get proper version: “UM2B”.
- read EKF process variance
- write new process variance
- issue RESET_EKF, get “bad checksum”.
- repeat RESET_EKF, get OK.
This is what it looks like, if I disable broadcast mode. If I enable it, I often get packets with wrong checksum, or packets that obviously look cut, in the initial burst of data (first read from sensor, skipped to the first ‘snp’ sequence, and then one or two packets with wrong checksums). Maybe it has something to do with sensor’s UART buffers? What works without problems, though, is after I manage to initialize the sensor, and normally periodically read data from it, I never get any errors. It works flawlessly, then.
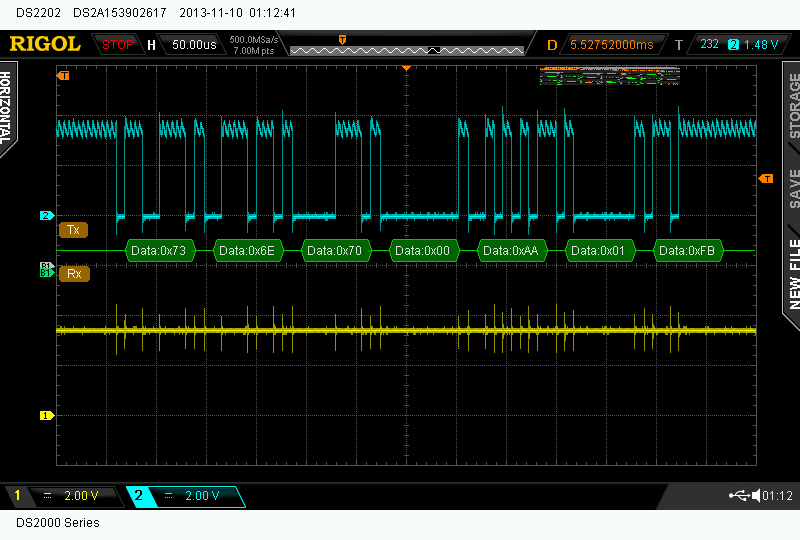
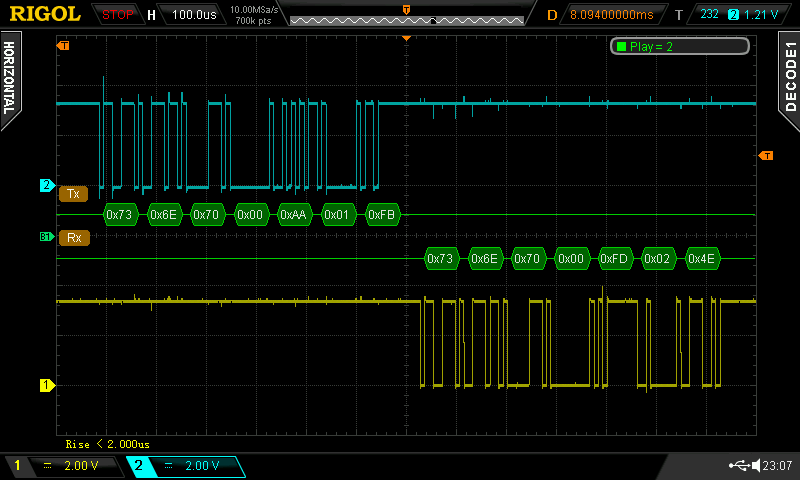
So my conclusion is that problem occurs only when I write to the sensor. Am I supposed to wait certain amount of time before sending some commands? Is there certain allowed sequence, on which commands should be sent? Or maybe I build command packets wrong way? (GET_FW_VERSION = 73:6e:70:00:aa:01:fb), but why would it work after second try?
I made sure that what you see here is what is transmitted over UART. I’ve had bugs in my code, obviously, when I first wrote it, but I’m pretty sure I eliminated at least those which would affect the communication. I also use my serial code with other devices (GPS) and it works correctly with them. This is the log of communication between my program and UM6, also graphs from the communication are attached. There’s fair amount of under and overshots visible, which I later fixed by adding 3.9nF capacitor between RX/TX lines and the ground. This has also reduced noise on the other line, when first was transmitting data. But the result is still all the same.
Is there someone from CHrobotics reading this forum? I’m not an expert, when it comes to electrical engineering, I’m a programmer myself. Maybe there’s some problem with my serial cable? It’s supposed to be TTL level USB-to-serial cable, I got it from Adafruit. It works with GPS, raspberry Pi, Beagle Bone black, without any issues.
More details follow:
Power: 5V from USB
Drawn current: about 48 mA most of the time, power source is able to deliver at least 0.5 A.
UART levels: 3.3V, not pulled up (it doesn’t work, anyway, I suppose there might be zener diodes inside my USB-serial cable, or something similar).
Speed: I’m using 115 kbps since it’s default, but it’s irrelevant since the same exact behaviour is on lower baud rates.
You can see the log from transmission, all bytes transmitted and received (denoted by SERIAL keyword).
1384005223.7507 [io/chr-um6 # ] Opening device /dev/ttyUSB0
1384005223.7527 [io/chr-um6 # ] Setting baud rate: 115200, data bits: 8, parity: none, stop bits: 1
1384005223.7528 [io/chr-um6 # ] Connected.
1384005223.7528 [io/chr-um6 # ]
1384005223.7529 [io/chr-um6 # ] NEXT INITIALIZATION STEP 0
1384005223.7529 [io/chr-um6 # ] * make_packet (0x0, Write, 0x7500504)
1384005223.7529 [io/chr-um6 # ] SERIAL <-- 73:6e:70:80:00:07:50:05:04:02:31 should write 11, wrote 11
1384005224.5533 [io/chr-um6 # ] SERIAL --> 73:6e:70:00:00:01:51
1384005224.5534 [io/chr-um6 # ] * process_packet (0x0, failed=0, has_data=0, data=0x0)
1384005224.5534 [io/chr-um6 # ]
1384005224.5534 [io/chr-um6 # ] NEXT INITIALIZATION STEP 1
1384005224.5535 [io/chr-um6 # ] * make_packet (0x1, Write, 0xf0000000)
1384005224.5535 [io/chr-um6 # ] SERIAL <-- 73:6e:70:80:01:f0:00:00:00:02:c2 should write 11, wrote 11
1384005224.5591 [io/chr-um6 # ] SERIAL --> 73:6e:70:00:01:01:52
1384005224.5591 [io/chr-um6 # ] * process_packet (0x1, failed=0, has_data=0, data=0x0)
1384005224.5591 [io/chr-um6 # ]
1384005224.5591 [io/chr-um6 # ] NEXT INITIALIZATION STEP 2
1384005224.5592 [io/chr-um6 # ] * make_packet (0xaa, Command, 0x0)
1384005224.5592 [io/chr-um6 # ] SERIAL <-- 73:6e:70:00:aa:01:fb should write 7, wrote 7
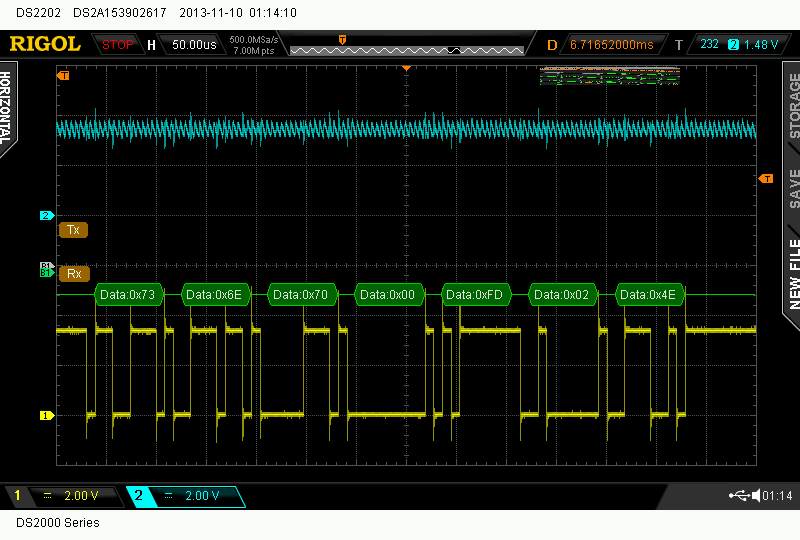
1384005224.7551 [io/chr-um6 # ] SERIAL --> 73:6e:70:00:fd:02:4e
1384005224.7552 [io/chr-um6 # ] * process_packet (0xfd, failed=0, has_data=0, data=0x0)
1384005224.7552 [io/chr-um6 # ] Command failed: bad checksum.
1384005224.7553 [io/chr-um6 # ]
1384005224.7553 [io/chr-um6 # ] NEXT INITIALIZATION STEP 2
1384005224.7553 [io/chr-um6 # ] * make_packet (0xaa, Command, 0x0)
1384005224.7553 [io/chr-um6 # ] SERIAL <-- 73:6e:70:00:aa:01:fb should write 7, wrote 7
1384005224.7619 [io/chr-um6 # ] SERIAL --> 73:6e:70:80:aa:55:4d:32:42:03:91
1384005224.7620 [io/chr-um6 # ] * process_packet (0xaa, failed=0, has_data=1, data=0x554d3242)
1384005224.7621 [io/chr-um6 # ] Firmware version: UM2B
1384005224.7621 [io/chr-um6 # ]
1384005224.7621 [io/chr-um6 # ] NEXT INITIALIZATION STEP 3
1384005224.7621 [io/chr-um6 # ] * make_packet (0xa, Read, 0x0)
1384005224.7622 [io/chr-um6 # ] SERIAL <-- 73:6e:70:00:0a:01:5b should write 7, wrote 7
1384005224.7631 [io/chr-um6 # ] SERIAL --> 73
1384005224.7632 [io/chr-um6 # ] SERIAL --> 6e
1384005224.7644 [io/chr-um6 # ] SERIAL --> 70:80:0a:3f:00:00:00:02:1a
1384005224.7645 [io/chr-um6 # ] * process_packet (0xa, failed=0, has_data=1, data=0x3f000000)
1384005224.7645 [io/chr-um6 # ] EKF process variance: 0.5
1384005224.7645 [io/chr-um6 # ]
1384005224.7645 [io/chr-um6 # ] NEXT INITIALIZATION STEP 4
1384005224.7645 [io/chr-um6 # ] * make_packet (0xa, Write, 0x3f000000)
1384005224.7646 [io/chr-um6 # ] SERIAL <-- 73:6e:70:80:0a:3f:00:00:00:02:1a should write 11, wrote 11
1384005224.7667 [io/chr-um6 # ] SERIAL --> 73
1384005224.7668 [io/chr-um6 # ] SERIAL --> 6e:70
1384005224.7670 [io/chr-um6 # ] SERIAL --> 00
1384005224.7671 [io/chr-um6 # ] SERIAL --> 0a:01
1384005224.7672 [io/chr-um6 # ] SERIAL --> 5b
1384005224.7672 [io/chr-um6 # ] * process_packet (0xa, failed=0, has_data=0, data=0x0)
1384005224.7672 [io/chr-um6 # ]
1384005224.7672 [io/chr-um6 # ] NEXT INITIALIZATION STEP 5
1384005224.7673 [io/chr-um6 # ] * make_packet (0xad, Command, 0x0)
1384005224.7673 [io/chr-um6 # ] SERIAL <-- 73:6e:70:00:ad:01:fe should write 7, wrote 7
1384005224.7689 [io/chr-um6 # ] SERIAL --> 73:6e:70
1384005224.7691 [io/chr-um6 # ] SERIAL --> 00
1384005224.7692 [io/chr-um6 # ] SERIAL --> fd
1384005224.7693 [io/chr-um6 # ] SERIAL --> 02:4e
1384005224.7694 [io/chr-um6 # ] * process_packet (0xfd, failed=0, has_data=0, data=0x0)
1384005224.7694 [io/chr-um6 # ] Command failed: bad checksum.
1384005224.7694 [io/chr-um6 # ]
1384005224.7694 [io/chr-um6 # ] NEXT INITIALIZATION STEP 5
1384005224.7694 [io/chr-um6 # ] * make_packet (0xad, Command, 0x0)
1384005224.7695 [io/chr-um6 # ] SERIAL <-- 73:6e:70:00:ad:01:fe should write 7, wrote 7
1384005224.7724 [io/chr-um6 # ] SERIAL --> 73
1384005224.7726 [io/chr-um6 # ] SERIAL --> 6e:70
1384005224.7727 [io/chr-um6 # ] SERIAL --> 00:ad
1384005224.7728 [io/chr-um6 # ] SERIAL --> 01
1384005224.7730 [io/chr-um6 # ] SERIAL --> fe
1384005224.7730 [io/chr-um6 # ] * process_packet (0xad, failed=0, has_data=0, data=0x0)
1384005224.7730 [io/chr-um6 # ]
1384005224.7730 [io/chr-um6 # ] NEXT INITIALIZATION STEP 6
1384005224.7730 [io/chr-um6 # ] * make_packet (0xaf, Command, 0x0)
1384005224.7731 [io/chr-um6 # ] SERIAL <-- 73:6e:70:00:af:02:00 should write 7, wrote 7
1384005224.7745 [io/chr-um6 # ] SERIAL --> 73:6e
1384005224.7746 [io/chr-um6 # ] SERIAL --> 70:00
1384005224.7747 [io/chr-um6 # ] SERIAL --> af:02
1384005224.7749 [io/chr-um6 # ] SERIAL --> 00
1384005224.7749 [io/chr-um6 # ] * process_packet (0xaf, failed=0, has_data=0, data=0x0)
1384005224.7750 [io/chr-um6 # ]
1384005224.7750 [io/chr-um6 # ] NEXT INITIALIZATION STEP 7
1384005224.7750 [io/chr-um6 # ] * make_packet (0xb0, Command, 0x0)
1384005224.7751 [io/chr-um6 # ] SERIAL <-- 73:6e:70:00:b0:02:01 should write 7, wrote 7
1384005224.7765 [io/chr-um6 # ] SERIAL --> 73
1384005224.7766 [io/chr-um6 # ] SERIAL --> 6e:70
1384005224.7767 [io/chr-um6 # ] SERIAL --> 00:b0
1384005224.7769 [io/chr-um6 # ] SERIAL --> 02:01
1384005224.7769 [io/chr-um6 # ] * process_packet (0xb0, failed=0, has_data=0, data=0x0)
1384005224.7769 [io/chr-um6 # ]
1384005224.7769 [io/chr-um6 # ] NEXT INITIALIZATION STEP 8
1384005224.7769 [io/chr-um6 # ] * make_packet (0xac, Command, 0x0)
1384005224.7770 [io/chr-um6 # ] SERIAL <-- 73:6e:70:00:ac:01:fd should write 7, wrote 7
1384005224.7785 [io/chr-um6 # ] SERIAL --> 73
1384005224.7786 [io/chr-um6 # ] SERIAL --> 6e:70
1384005224.7787 [io/chr-um6 # ] SERIAL --> 00
1384005224.7788 [io/chr-um6 # ] SERIAL --> ac:01
1384005224.7789 [io/chr-um6 # ] SERIAL --> fd
1384005224.7790 [io/chr-um6 # ] * process_packet (0xac, failed=0, has_data=0, data=0x0)
1384005224.7790 [io/chr-um6 # ] Gyros zeroed.
1384005224.7790 [io/chr-um6 # ]
1384005224.7790 [io/chr-um6 # ] NEXT INITIALIZATION STEP 9
1384005225.8063 [io/chr-um6 # ] SERIAL --> 73:6e:70:c8
1384005225.8064 [io/chr-um6 # ] SERIAL --> 0b:ff
1384005225.8068 [io/chr-um6 # ] SERIAL --> e3:00:1c:00:07
1384005225.8069 [io/chr-um6 # ] SERIAL --> 00
1384005225.8071 [io/chr-um6 # ] SERIAL --> 00:04:29
1384005225.8072 [io/chr-um6 # ] * process_packet (0xb, failed=0, has_data=1, data=0xffe3001c)
1384005225.8072 [io/chr-um6 # ] Unhandled address 0xb.
1384005225.8072 [io/chr-um6 # ] * process_packet (0xc, failed=0, has_data=1, data=0x70000)
1384005225.8073 [io/chr-um6 # ] Unhandled address 0xc.