So I started a new robot at the beginning of last week. Did it in CAD first, and then started building. Ordered a bunch of parts, mostly from Pololu. 3D printed a bunch of parts.
Here’s the CAD model:
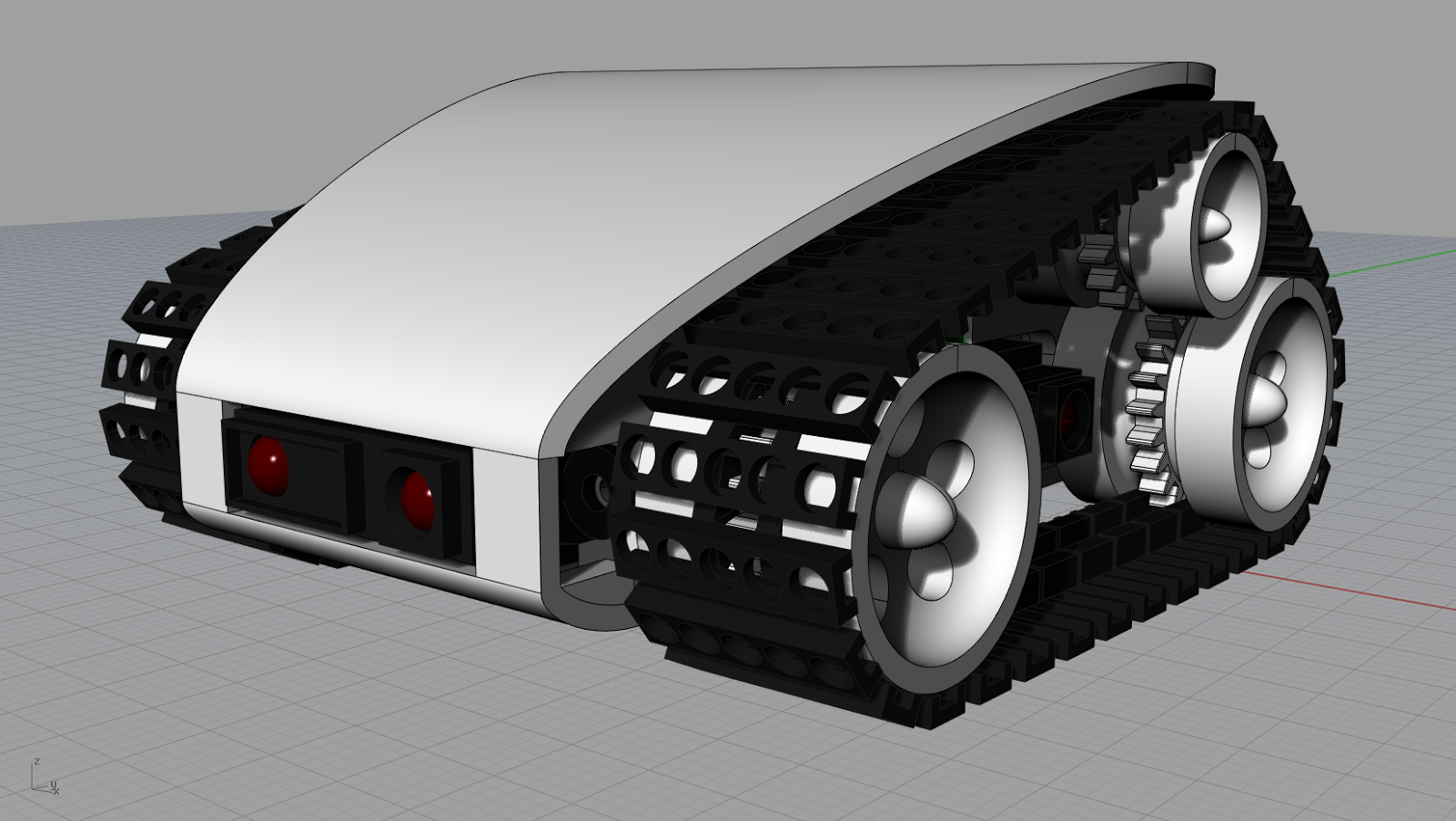
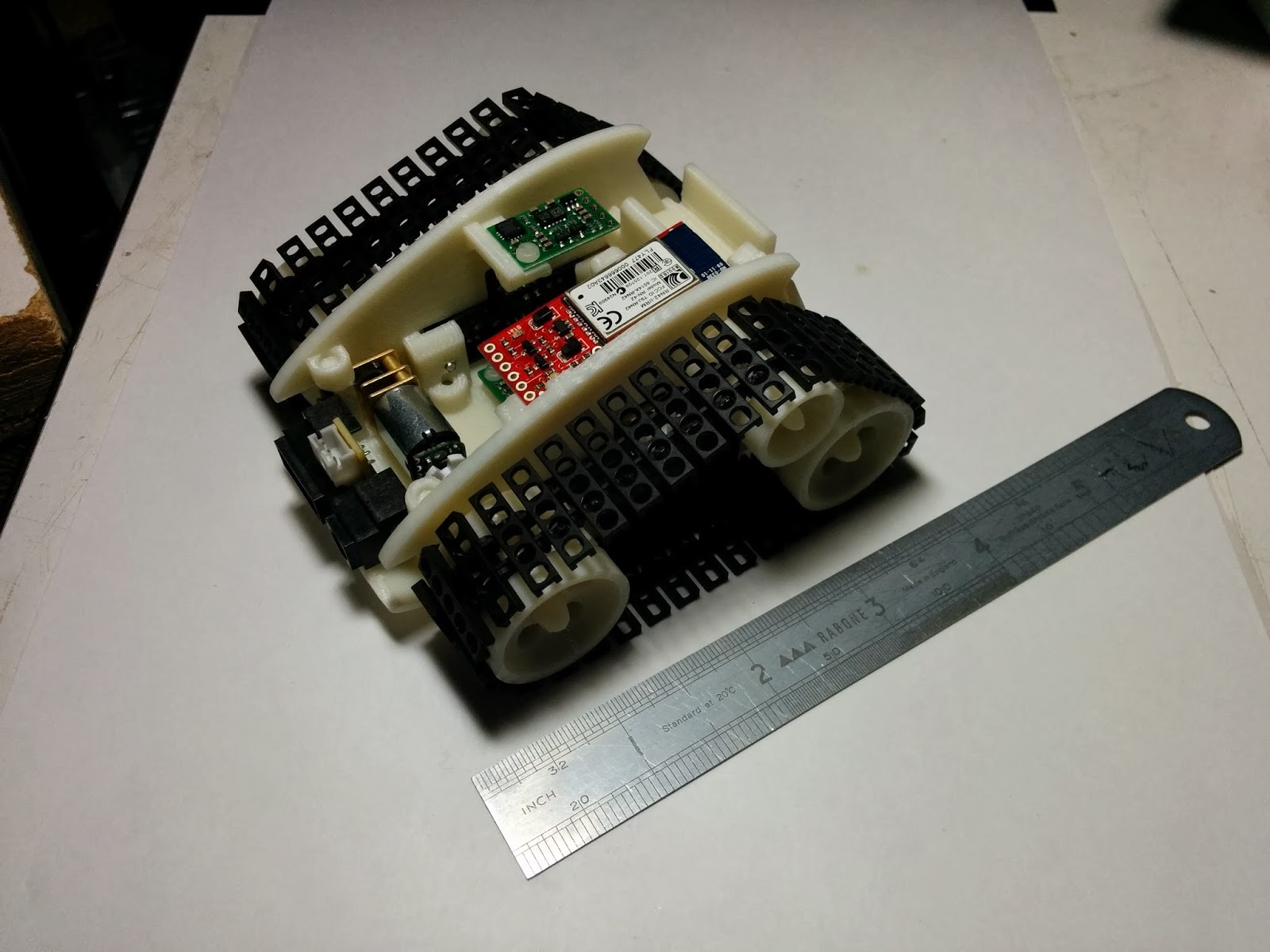
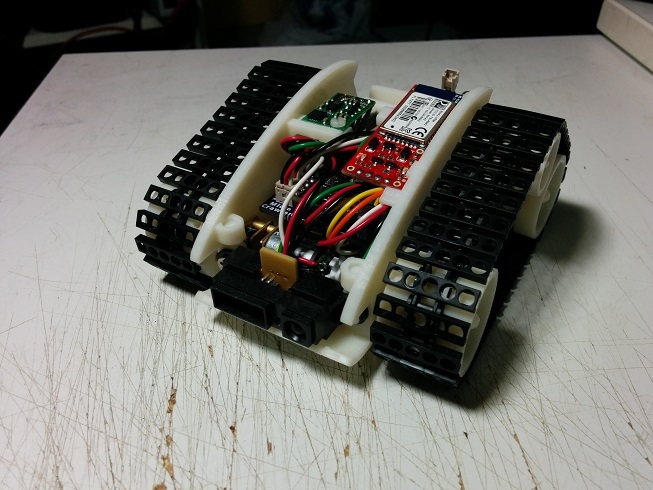
Although it probably doesn’t look it, its a tiny little thing - 102mm long, 91mm wide, and 50mm high. That’s about 4" x 3.75" x 2" for non-metric people. It uses Lego Technic tracks, but everything else structural (wheels, chassis) are 3D printed.
I’m going to be using a Teensy 3.1 as the main processor, and I have a Pololu 2-motor h-bridge (an old one I bought a few years ago and never used). I ordered the micro gearmotors (100:1) with the encoder back shafts, along with the encoders. I also ordered the MiniIMU-9 v2, and a BlueSMiRF Silver for wireless communications. It also has 3 Sharp IR sensors and it will also have 3 ProxDot close-range IR sensors.
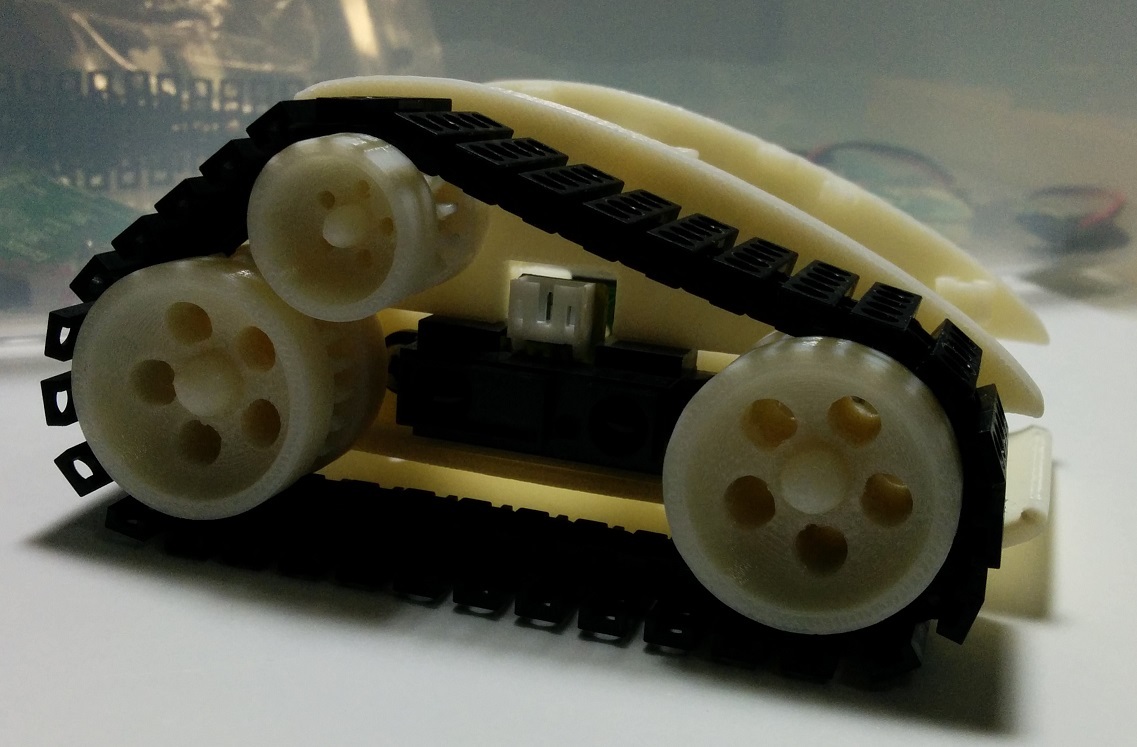
Here are a couple pics of my progress so far:
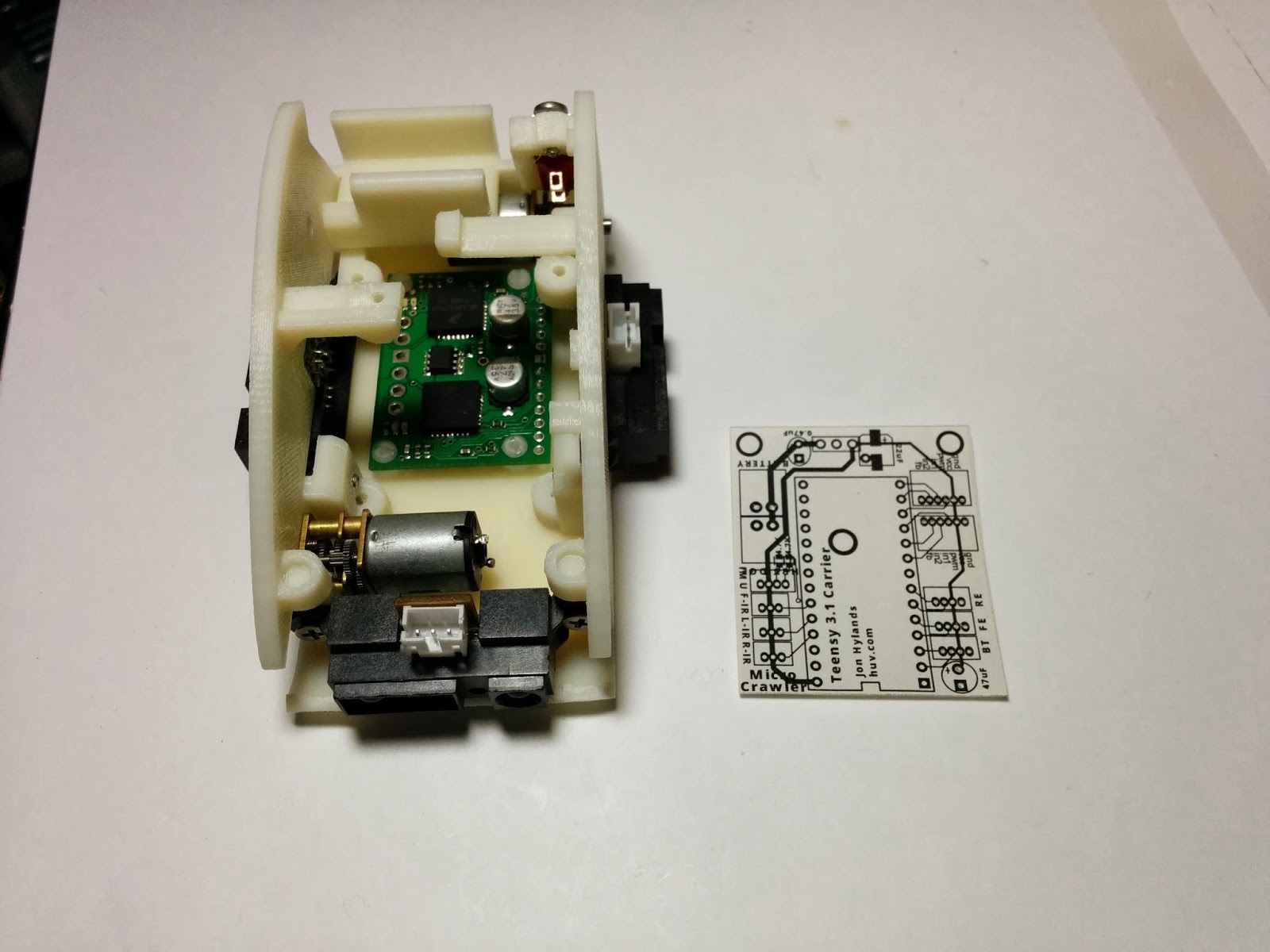
Note that those aren’t the gearmotors I ordered - they are just some that are the same size that I had in a drawer. The paper printout is a PCB I designed that has been submitted to OSH Park (http://oshpark.com) to hold the Teensy, and provide plugs for all the sensors and motor drivers and such.
I’m planning on writing a GUI on my Android phone to get status from the robot while its wandering around (it will be fully autonomous) over bluetooth serial.
I have more pictures and writing on my blog: http://blog.huv.com
- Jon