Dear All
I use a TIC 36v4 to start a linear movement using a potentiometer. The min position is first approached using a homing sensor. That works perfectly.
Problem 1:
There are problems if you change the position of the potentiometer while the motor is running, it seems as if the hysteresis circuit is not working. (when the motor is not running, the input signal of the potentiometer is mapped correctly)
Problem 2:
Position is not approached linearly, target 0 is output between approx. 0-50% of the potentiometer, 50-100% is then approached correctly. It seems the controller only accepts a homing sensor in neutral position.
Anyone has experience with these problems? Thanks in advance.
Hello.
I am sorry to hear you are having problems with configuring your Tic for your application.
-
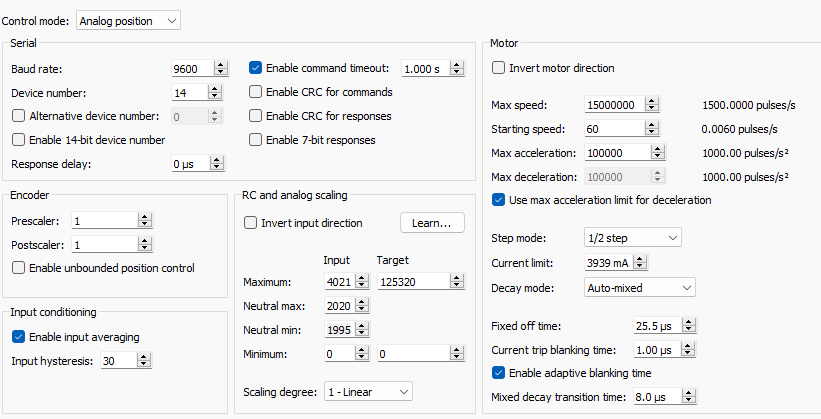
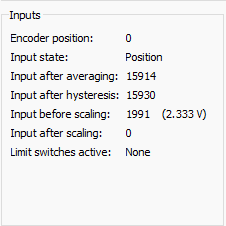
The input hysteresis is turned off by default; did you enable and configure it? If so, what value did you set it to? As mentioned in the “Analog/RC input handling” section of the Tic user’s guide, one way to choose a good hysteresis value is to look at the “Input after averaging” variable displayed in the Tic Control Center, see how much it varies when you are not moving the input, and set the hysteresis value to something larger than that.
-
Yes, as described in the “Homing” section of the guide, the current position is set to the 0 position at the end of the homing procedure. To use the full range of your potentiometer, you can adjust the scaling setting in the “input and motor settings” tab of the Tic Control Center. I suggest following the instructions I posted here for doing that.
If you continue having problems to get it to behave how you want, could you post a copy of your settings file, as well as a description of what it is doing differently from what you want? You can save a copy of your settings file from the “File” drop-down menu of the Tic Control Center while the controller is connected.
Brandon
Dear Brandon
Long time ago, still the same problem… 
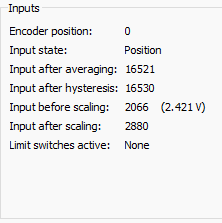
The potentiometer is set to approximately 45%: target position 0, 50% position: target position 2880.
Why does the control center scale from 0-50% to a target position of 0?
The way the scaling works on the Tic, the “Neutral” position is mapped to a target position of 0. So, if you want to only use positive target values, you can set the “Neutral min” input to 0 and the “Neutral max” input to something like 35 (if you want to keep some buffer, otherwise you could set it to 0 as well).
Alternatively, you could split the movement up so it centers on zero. For example, leave your input values as they are, but change the “Maximum” target value to 62660 and the “Minimum” target value to -62660.
Brandon
1 Like