“The Start of the Project. Part 1.1. How I Assembled a Wheeled Telepresence Robot.” Endurance’s Technologies
By 2015 most members of our future team managed to earn enough money to risk their time in long-term perspective (with 1 year time bucket). We decided to organize a startup. Do buying and selling? Nooo! Start a technological project. To develop robots and 1-10Wt solid lasers, in particular.
I have always liked the idea of being present at the right time in an interesting faraway place. All of us like online broadcasting. Thanks to the telepresence robot, I can remotely change the direction of my look, the place of my telepresence. That’s why when we started the Endurance Robots in 2015 I set to development of the wheeled telepresence robot. The wheeled platform will allow it to move indoors and outdoors, and the telepresence system – to watch the occurring events. Our final aim is to create full virtual reality with a robot controlled by a person with the help of Oculus rift!
For a start I googled a lot to study similar solutions: PadBot (China), BotEyes (Russia), Double Robotics (USA), Webot (Russia), OrigiBot (USA), Oculus (Canada), Anybot (USA), RBOT Synergy (Russia) and drew a table of the robots’ comparative data. They differed in functions: some could take things with manipulators (a beer can from a frig), some could overcome high obstacles, autonomously take charge, etc. As you would expect, the prices ranged from $1000 до $10000. As I realized later, inexpensive devices (below $5000) were robotized platforms controlled by an operator, not autonomous robots with the ability to take decisions in various situations: recognize and skirt obstacle; travel a route from A to B; recognize spoken commands.
Our Endurance Robots team decided to enter the market of economy platforms at the price of $2000 and bellow. On the basis of the robots’ comparative data, I selected the features, with which we wanted to invest our device first and foremost. They are: operation time (8 hours and more, full working day), obstacle crossing (3,5 cm high, sill height), reliable transmission of control commands via Internet, high quality video and audio connection.
Somebody of the team suggested that we should make the robot body out of a dress form and install a tablet on its breast. We even bought a used dress form imitating a female torso for $2 (a new one costs ~$100), but due to the modesty of our financial means, the idea died.
Market research showed that people looked for not just a wheeled tablet but for a robotized smart platform, capable of speech and image recognition (open source, Open CV), capable of correctly answering the questions (Artificial Intelligence), of moving to the object to fetch it and carry it to another place. A wheeled platform is just a necessary addition to our solution. Strategically, a wheeled platform is the main form factor. As a notebook → a tablet. A new form is a new product.

The first stage task is to develop a wheeled platform: inexpensive (below $200 for low-volume production), efficient (with a trouble-proof running, modularity, reliable software/hardware), easy to maintain, user-friendly (just mount the phone, upload the app, and activate the system), easy to upgrade and improve, operator manageable (an operator controls electro motors and servos via the Internet).
Essential requirements for the construction performance are as follows:
— Suitability for industrial production.
— Reliability in daily use (1 year, at least)
— Components interchangeability and complementarity (there’s enough room to fix one more speaker or a second camera).
— Attach hardware flexibility.
— Travel directness.
— Noise and vibration less than 10 DCB.
— Lightness and portability.
— For areas with even surfaces (laminate, tiles, wood, concrete, linoleum) and sills not more than 1 cm high.
— Design appeal, ergonomics, user-friendly, and portability
TECHNICAL FEATURES OF THE CONSTRUCTION
— Max. speed up to 3 km/h.
— The height of the upper screen edge is ~1.5 m (preferably, with the height range of 1.2 m -1.8 m).
And a million questions poured.
What is the max. allowed weight at the height of 180 cm? A tablet + a cradle + two servos? Will a three-wheeled construction be stable with the chosen batteries at the sides if one or two wheels come across an obstacle 3,5 cm high? What is the optimum size of the wheels? What kind of wheels, of what material?

What kind of wheels: omni, smooth tread, ribbed cord tires?
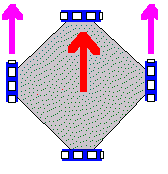
How many wheels: three or four? How to fix them to the shaft?

To the gear reducer shaft or motor shaft?

What kind of motor to choose? Commutator, commutatorless, stepper? What kind of material to choose to make a frame?
Eventually, I made my first prototype of the materials available in any hardware store: three wheels (2 drive wheels and a swivel wheel), a frame made of thin aluminum n-shape, self-threaded screws, screw bolts, and two steppers.
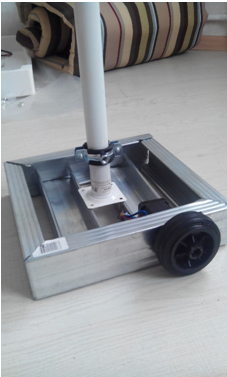

Important, that this prototype was of good service to our circuit designer Andrey for thorough electronics testing.
In this article I described the beginning of our long path. The products and photos are amateurish. But in the next parts I’ll show a more professional approach.
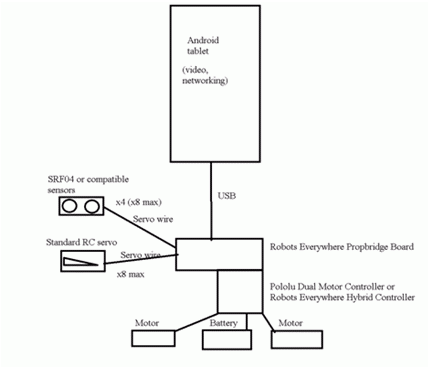
This is the mechanics and electronics scheme we used.