
Hello all;
First post here.
Just wanted to share what I’ve been working on.
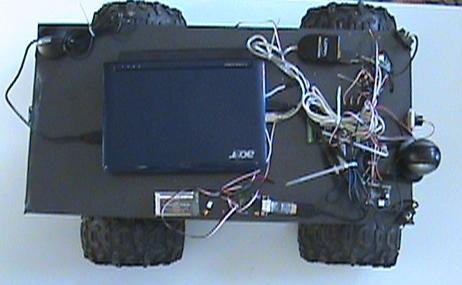
It is a fully autonomous ground vehicle based on a Traxxas Summit R/C Truck. It is powered by an Acer Aspire One netbook with an Intel Atom CPU @1.6Ghz. It uses a simple USB GPS for navigation, for obstacle avoidance it uses a Webcam with software based on Aforge with 2 IR and 2 sonar sensors. I started working on it originally to enter into a local competition, but the competition never toke place so… I named it proximiter cause it’s always looking for proximity ![]()
![]()
![]()
So now that it never ended up doing what I made it for, I’m thinking of making it an opensource project so everyone can experiment with it.
It uses a pololu serial servo controller ![]() . The software is written entirely in C#(7900 lines
. The software is written entirely in C#(7900 lines ![]() ) and assembler.
) and assembler.
When a GPS point is selected, it will find it’s way to the point. When it runs into obstacles, it will steer clear of them if they’re deemed to high or too deep. If it can’t get to the end point in a certain time, it will create a new path for itself while avoiding areas from the previous attempt.
At this point you either enter GPS coordinates manually on the laptop, or via a wifi or bluetooth smartphone of PDA.
Right now I’m in the process of putting a mini ITX board on it with an intel core 2 duo instead of the netbook for more CPU power because I want it to have 4 camera on it. The ultimate goal is to completely eliminate the sensors and rely only on cameras. (Just like humas when we drive) although I know I’m pretty darn far from that ![]()
Let me know what you think. It’s not pretty for sure but works pretty well. My only concern about open source is that I’ll have to keep some of it closed cause I really don’t want anyone taking it and marketing it as their own. I want it strictly for educational and recreational purposes.
Soon when all the bugs worked out I’ll be posting it on my website under projects with source code.



 ). If the measurements are accurate one relative to another that would be fine for me I think.
). If the measurements are accurate one relative to another that would be fine for me I think.