Hi
I have a Baby Orangutan B-168, and a bit over sized motor.
No load its runs around 0.6-1.6A and it can peak to ~6A if i stall it.
Anyway, i was reading the specs @ pololu.com/catalog/product/713
And i found this: “*Output current continuous: 1 A per channel (can be paralleled to deliver 2 A continuous)” , but i couldn’t find more info about the topic.
So my questions are:
If i get the channels paralleled, can it also handle peaks up to 5-6A?
How do i do it, what to solder and where?
Something special i need to think about while programming it?
When we say it can handle peaks of 5-6 A that is referring to transients (very short time periods). If your motor is stalled for longer than a couple of seconds, the driver is going to go into thermal shutdown mode. We don’t recommend relying on thermal shutdown because it will shutdown at an unknown time, and might damage the driver if done enough times. If you haven’t bought the driver yet, I would recommend something beefier.
What voltage is that stall current rating for? The stall current is a function of the voltage, so a higher voltage will mean a higher stall current.
You connect A01 to B01, A02 to B02, PWMA to PWMB, AIN1 to BIN1, and AIN2 to BIN2.
To elaborate slightly on what Ryan said, if you physically connect the inputs of the two motor driver channels together, then there is nothing to worry about when it comes to programming. If you keep them separate and just try to generate the same signals on both channels in code, however, then you must be very careful that your signals are synchronized, otherwise you could be shorting two different voltages together on the outputs. For example, if you use different PWMs on PWMA and PWMB, it is crucial that they be sychronized; it is not sufficient to just have the PWMs be the same frequency and duty cycle. For this reason, I strongly recommend you only use a single set of control inputs (two pins for direction and one for PWM) and wire these to the inputs of both channels.
It’s at 7.2V and thats what my battery is charged with.
The motor controller i have, is the one stuck on the motherboard of the baby o, i think its the tb6612fng right?
So to summarize the best solution as i understand it:
-On the board i need to connect PWMA to PWMB, AIN1 to BIN1, and AIN2 to BIN2. (To really get it synchronous)
-And externally i can then connect, A01 to B01, A02 to B02. (Not marked on the Baby O, board but i guess i can figure it out.)
-Sw vice, i set one pair of the ports to be passive and ignores it and control the controller through the other one.
I guess i can do that, even do i was hoping for less ports to connect, and more software fixes to be done , since I’m not an expert in connecting small pin’s.
Because of the way the driver is connected to the AVR on the Baby Orangutan, there really isn’t a good way to do things in software. I recommend that you physically short AIN1 to BIN1 and AIN2 to BIN2. You don’t need to do anything with PWMA and PWMB since both of those are already connected together (via the Vcc rail). In you software, make sure you keep the AVR pins connected to motor channel 2 as floating inputs, and control both drivers with the pins connected to motor channel 1. This will require tweaking the Pololu AVR library since the library sets all motor control pins as outputs. Please let us know if you need help doing this.
Thanks for the help! and sorry for the “original confusing question”
Anyway, now its done, the ports are connected, i also created a data buss between my 2 baby O’s so they can talk to each other.
So some day soon, i hope i can have my first real test run, then i will post a video here.
It works! Motors runs fine now without getting mc warm, or toasted!
Just a note: The naming of the motor ports are a bit confusing, if you look at this pololu.com/picture/view/0J663 you might do something bad like connecting A to A and B to B
So for anyone else doing this: M2A should be connected to M1B and M1A to M2B.
Your warning note doesn’t sound right. The pairs to connect will depend on how you’re controlling the inputs, so maybe you have those paired up in a weird way.
I think your confusion comes from the different naming conventions we use compared to what Toshiba uses. Toshiba is labeling the different motors outputs A and B with 1 and 2 being the different motor leads. We are labeling the different motors 1 and 2 with A and B being the different motor leads.
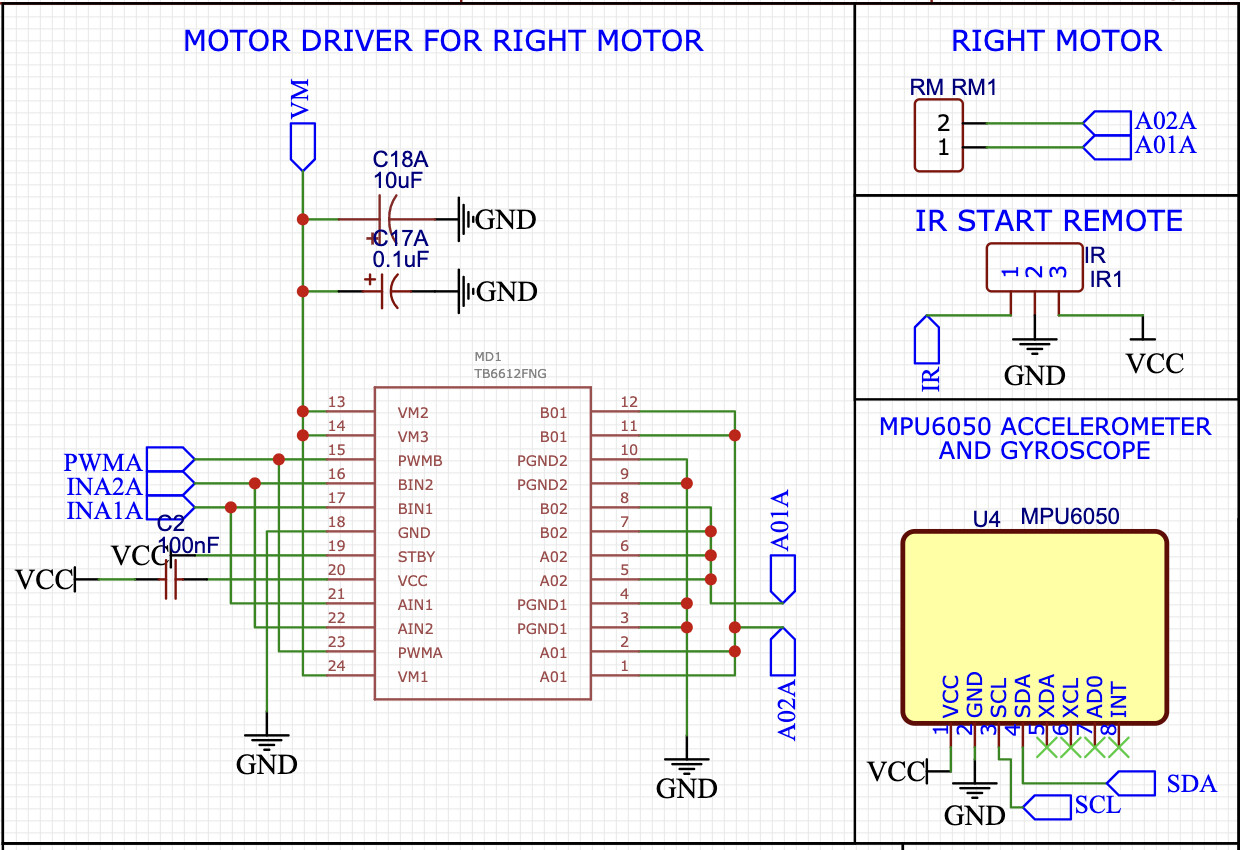
I think the confusion here comes from the fact that the wiring for Motor 2 (as shown on the on the Baby Orangutan’s schematic) is done differently than for Motor 1:
I promised you a video of the project and i have it on my page.
So just go to microbotics.se search for “minitest run 1”, the speed and power is awesome, the question is if i can control it inside a mini sumo arena
Unfortunately, no. To parallel the driver’s outputs the way that we recommend, you have to make connections on the driver inputs, which are internal on the Baby Orangutan.
I did not notice any obvious problems with how you have the motor output connections in your schematic; it seems to match what ryantm described in his post above. However, it looks like you have a capacitor between VCC and the VCC pin (instead of between VCC and GND like I would expect). Additionally, please note that our carrier board already has capacitance on that line, so if you are using that, you probably do not need to add any more.