
Hi,
I’m a beginner in robot based project. I found a line follower project tutorial by Mr.Arnabdas https://www.youtube.com/watch?v=7-ju19RMWlw.
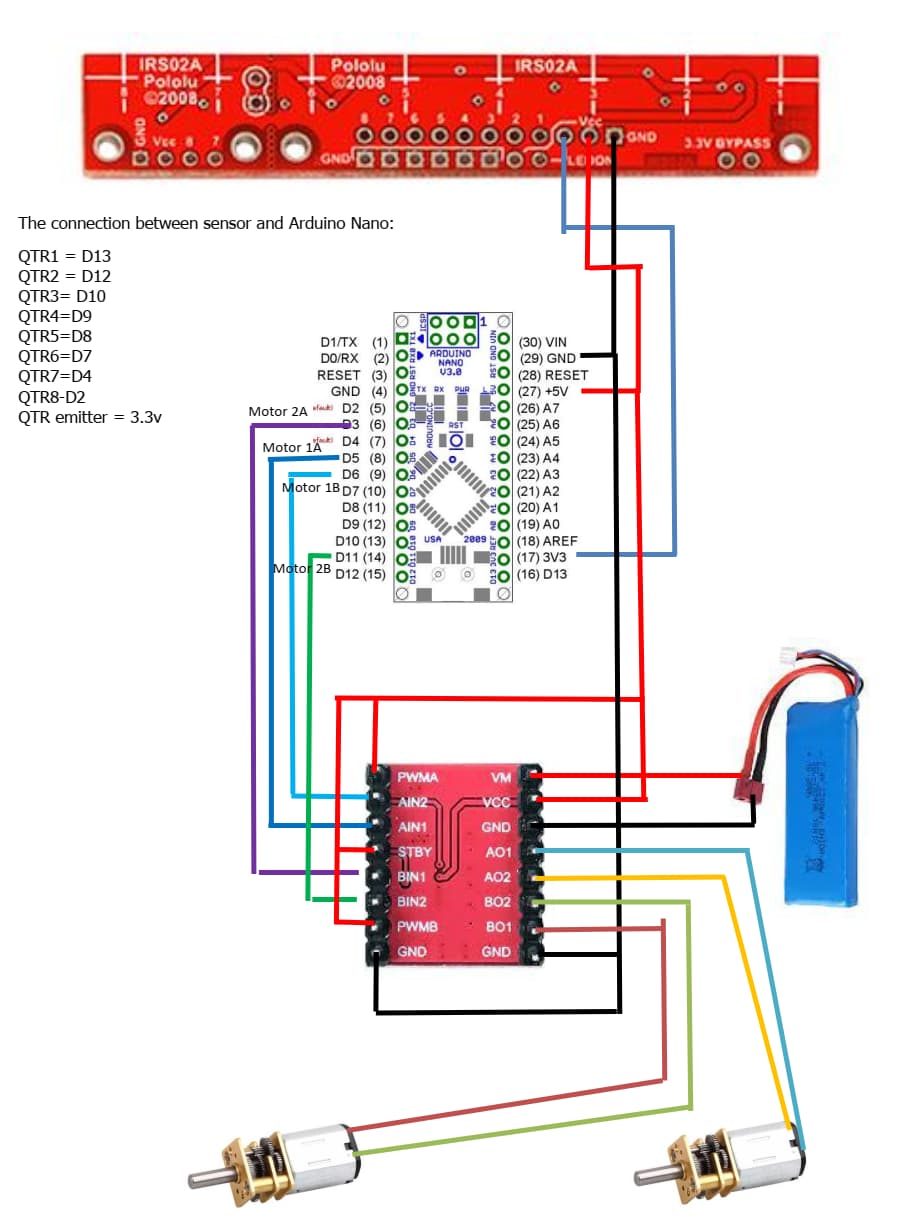
He gave me a diagram and the code for the project. I need help regarding to connection between the components in the project since I got confused with the diagram and how to connect QTR-8RC properly. Here I have attach the schematic diagram that I got from him and a diagram that I used to connect all the components.
I hope some one could tell me what I did wrong in this project. Here is my achievement so far (literally) https://youtu.be/-Q1MztrDLj8.
Here is the schematic diagram:
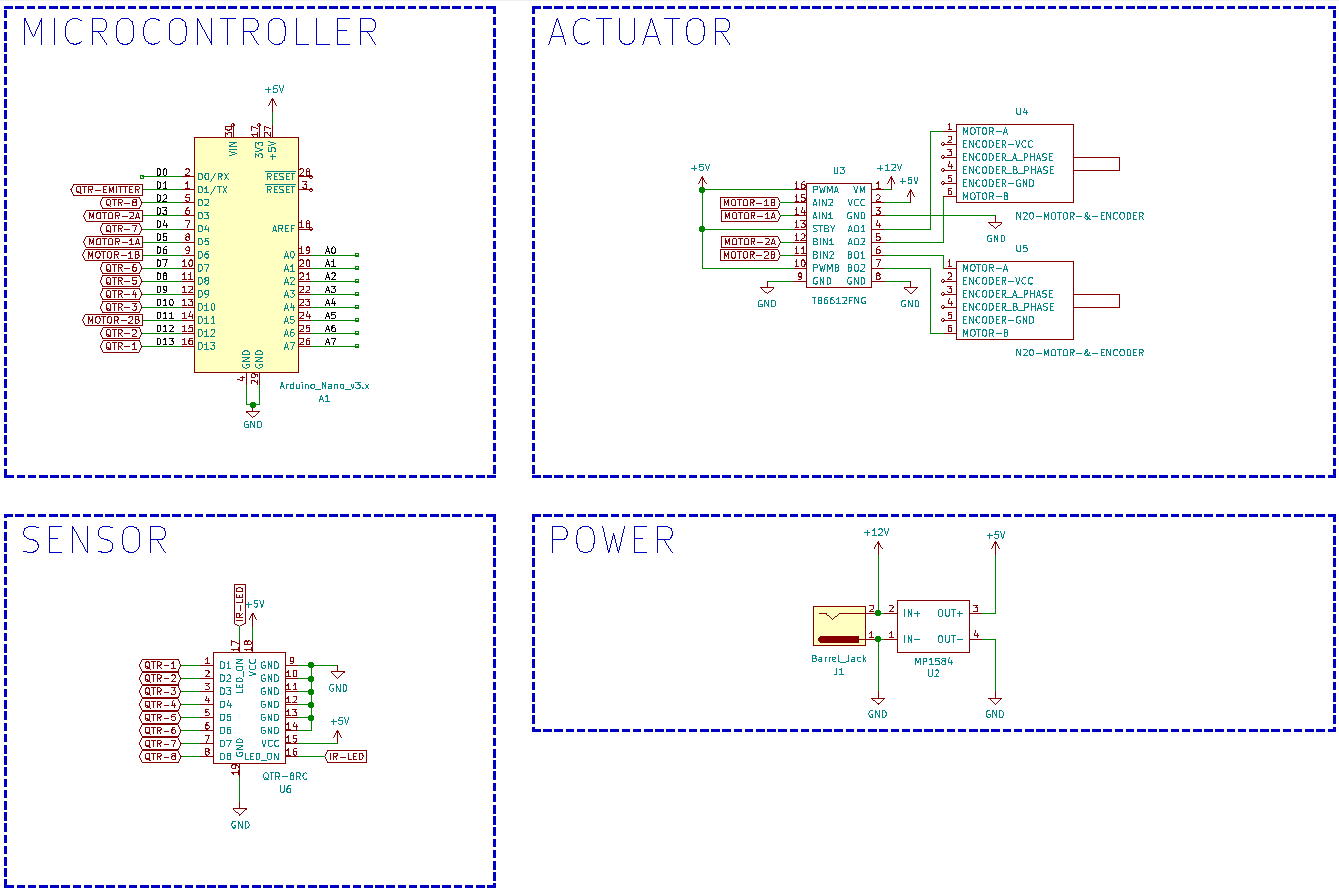
And here is what I was understood from the diagram (connection that I made to my project):
And here is the code given by him:
/*
* Arduino NANO - QTR-8RC - PID Line Follower Robot V1
*
* Created: 14-07-2021 10:44:58 PM
* Author : Arnab Kumar Das
* Website: http://www.ArnabKumarDas.com/
*/
#include <avr/io.h>
#include "avr_gpio.h"
#include "avr_motor.h"
#include "avr_qtr.h"
#define LFR_MAX_MOTOR_SPEED 255 /**< Sets the Maximum PWM Duty Cycle for Line Follower Robot 0=0% 255=100% */
void LFR_Initialize()
{
/**< Sets the Pin Mapping for QTR-8RC Sensor ; Change the Individual Pin Macros in avr_qtr.h */
uint8_t QTR_Pins[] = {QTR_1_PIN, QTR_2_PIN, QTR_3_PIN, QTR_4_PIN, QTR_5_PIN, QTR_6_PIN, QTR_7_PIN, QTR_8_PIN};
QTR_Init(QTR_Pins, QTR_EMITTER_PIN); /**< Initializes the QTR-8RC Sensor */
Motor_Init(); /**< Initializes the Motors */
_delay_ms(2000); /**< Pause ; Useful to Align the Robot Manually if Outside the Line */
}
void LFR_Calibrate()
{
Motor_SetSpeed(90, -90); /**< Rotates the Robot */
for(uint8_t i=0; i<40; i++) /**< Calibrate the QTR-8RC Sensor */
{
QTR_CalibrateSensor(QTR_EMITTERS_ON);
_delay_ms(20);
}
Motor_SetSpeed(0,0); /**< Stops the Robot */
_delay_ms(500);
Motor_SetSpeed(-90, 90); /**< Rotates the Robot */
for(uint8_t i=0; i<80; i++) /**< Calibrate the QTR-8RC Sensor */
{
QTR_CalibrateSensor(QTR_EMITTERS_ON);
_delay_ms(20);
}
Motor_SetSpeed(0,0); /**< Stops the Robot */
_delay_ms(500);
Motor_SetSpeed(90, -90); /**< Rotates the Robot */
for(uint8_t i=0; i<40; i++) /**< Calibrate the QTR-8RC Sensor */
{
QTR_CalibrateSensor(QTR_EMITTERS_ON);
_delay_ms(20);
}
Motor_SetSpeed(0,0); /**< Stops the Robot */
_delay_ms(2000); /**< Pause ; Useful to Realign the Robot Manually if Outside the Line */
}
int main()
{
uint16_t LFR_SensorValue[8]; /**< Array to Save Raw IR Sensor values of QTR-8RC */
uint16_t LFR_Position = 0; /**< Variable to Save the QTR-8RC Sensor Position */
int16_t LFR_Proportional = 0; /**< Variable to Save the Proportional Output of PID Control Algorithm */
int16_t LFR_LastProportional = 0; /**< Variable to Save the Previous Proportional Output of PID Control Algorithm */
int16_t LFR_Derivative = 0; /**< Variable to Save the Derivative Output of PID Control Algorithm */
int64_t LFR_Integral = 0; /**< Variable to Save the Integral Output of PID Control Algorithm */
int16_t LFR_ControlOutput = 0; /**< Variable to Save the Final Control Output of PID Control Algorithm */
LFR_Initialize(); /**< Function to Initialize all Peripherals */
LFR_Calibrate(); /**< Function to Calibrate QTR-8RC Sensor */
while(1)
{
LFR_Position = QTR_ReadLine(LFR_SensorValue, QTR_EMITTERS_ON); /**< Reads the QTR-8RC Line Sensor to Get the Line Position */
LFR_Proportional = LFR_Position - QTR_LINE_MID_VALUE; /**< Computes the Proportional Output of PID Control Algorithm */
LFR_Derivative = LFR_Proportional - LFR_LastProportional; /**< Computes the Derivative Output of PID Control Algorithm */
LFR_Integral += LFR_Proportional; /**< Computes the Integral Output of PID Control Algorithm */
LFR_LastProportional = LFR_Proportional; /**< Saves the Old Proportional Output of PID Control Algorithm */
LFR_ControlOutput = LFR_Proportional/10 + LFR_Integral/10000 + LFR_Derivative*3/2; /**< Computes the Final Control Output of PID Control Algorithm */
if(LFR_ControlOutput > LFR_MAX_MOTOR_SPEED)
{
LFR_ControlOutput = LFR_MAX_MOTOR_SPEED; /**< Keeps The Motor Speed in Limit */
}
if(LFR_ControlOutput < -LFR_MAX_MOTOR_SPEED)
{
LFR_ControlOutput = -LFR_MAX_MOTOR_SPEED; /**< Keeps The Motor Speed in Limit */
}
if(LFR_ControlOutput < 0)
{
Motor_SetSpeed(LFR_MAX_MOTOR_SPEED + LFR_ControlOutput, LFR_MAX_MOTOR_SPEED); /**< Drives the Motor According to the Control Output */
}
else
{
Motor_SetSpeed(LFR_MAX_MOTOR_SPEED, LFR_MAX_MOTOR_SPEED - LFR_ControlOutput); /**< Drives the Motor According to the Control Output */
}
}
}
I hope someone can help me on this project and sorry for my bad English. Thanks.