
Hello team, I’m getting some strange errors that don’t follow a pattern I can figure out. I’m using an arduino Mega 2560 to call a Maestro mini 24 over Serial using restartScript. all sub routines in the maestro script use quit at the end. My arduino code which I’ll post below seems to work great until it causes what looks like a serial error on the maestro. I have code that recovers but it sporadically errors out. looks to me like somethings wrong with the serial connections somewhere. I switched out the wires and made them very short to eliminate that possibility. I was thinking the arduino could be noisy and causing the problems because sometimes the Serial console output has funny characters. also when I’m sending serial commands from the Arduino AND I have the usb cable plugged into my pc and the maestro the errors do not occur at all. by the way I’m using the Pololu Arduino Library and I think its calling the compact protocol by default? I tried passing a device number to engage the Pololu protocol but I can’t find an example of that and when I pass the serial number of the device it doesn’t work at all. I’ll post the code and serial output. I appreciate any help!!!
Arduino Test Code:
/* This example shows how to control Maestro scripts with an
Arduino. It assumes you have an RC hobby servo connected on
channel 0 of your Maestro, and that you have already used the
Maestro Control Center software to verify that the servo is
powered correctly and moves when you command it to from the
Maestro Control Center software.
Before using this example, you should go to the Serial Settings
tab in the Maestro Control Center and apply these settings:
* Serial mode: UART, fixed baud rate
* Baud rate: 9600
* CRC disabled
Be sure to click "Apply Settings" after making any changes.
It also assumes you have connected your Arduino to your Maestro
appropriately. If you have not done so, please see
https://github.com/pololu/maestro-arduino for more details on how
to make the connection between your Arduino and your Maestro.
Also, the Maestro needs to have the script in the comment
below installed on it. */
/*
# Maestro script for Script.ino Arduino library example.
# Copy into the Script tab of the Maestro Control Center and
# click Apply Settings.
# Don't do anything by default.
begin
repeat
# Subroutine 0
sub alternate_mid_to_high
begin
6000 0 servo
1000 delay
7000 0 servo
1000 delay
repeat
# Subroutine 1
# Expects the delay time to be on the top of the stack
sub alternate_mid_to_low
begin
6000 0 servo
dup delay
5000 0 servo
dup delay
repeat
*/
#include <PololuMaestro.h>
/* On boards with a hardware serial port available for use, use
that port to communicate with the Maestro. For other boards,
create a SoftwareSerial object using pin 10 to receive (RX) and
pin 11 to transmit (TX). */
/* Next, create a Maestro object using the serial port.
Uncomment one of MicroMaestro or MiniMaestro below depending
on which one you have. */
//hard code device number to use pololu protocol
const uint8_t maestroDeviceNum = 382748;
#define maestroSerial Serial1
//MiniMaestro maestro(maestroSerial,13,maestroDeviceNum);
MiniMaestro maestro(maestroSerial,13);
int index = 0;
uint8_t scriptstatus = 1;
uint8_t servostatus = 0;
uint8_t errorstate = 0;
long scriptruntime = 0;
const long MAXLENGTH = 48000; //48 seconds
unsigned long lastUpdate = 0;
void setup()
{
/* Pololu needs to be configured like below, dual port isn't working
*Serial mode: UART, fixed baud rate
* Baud rate: 9600
* CRC disabled
*/
maestroSerial.begin(9600);
Serial.begin(115200);
Serial.println("Test Maestro");
//maestro.goHome();
delay(1000);
Serial.println("went home");
}
//for debugging error code from maestro
void printBits(byte myByte)
{
for(byte mask = 0x80; mask; mask >>= 1)
{
if(mask & myByte)
Serial.print('1');
else
Serial.print('0');
}
Serial.println("");
}
bool resetscript = false;
void loop()
{
errorstate = 0;
/* Subroutine numbers can be found by clicking "View Compiled
Code..." on the Maestro Control Center script tab.
Restart script at subroutine 0. Subroutine 0 constantly
alternates the servo position from the neutral position to the
high end of the range. */
scriptstatus = maestro.getScriptStatus(); //@return 1 if script is stopped, 0 if running.
//Serial.print("Status = ");Serial.println(scriptstatus);
errorstate = maestro.getErrors();
if(errorstate > 0)
{
Serial.print("Status = ");Serial.print(scriptstatus);Serial.print(" error "); printBits(errorstate);
//Serial.println(errorstate);
}
if((millis() - lastUpdate) > MAXLENGTH)
{
resetscript = true; //recover from error where script status stays running
}
//Play script if these are true
if(scriptstatus == 1 || resetscript)
{
lastUpdate = millis();
resetscript = false;
if(index >=7)
{
index = 0; //reset
}
Serial.print("Play script ");Serial.println(index);
//maestro.stopScript();
maestro.restartScript(index);
index++;
//delay(500);
scriptstatus = maestro.getScriptStatus();
delay(500);
errorstate = maestro.getErrors();
if(errorstate > 0)
{
Serial.print("script Status ");Serial.println(scriptstatus);
Serial.print("error");printBits(errorstate);
}
if(errorstate != 0)
{
//Serial.println("Resetting Maestro");
//maestro.reset();
}
delay(2000);
}
delay(1000);
// Stop the running script.
//maestro.stopScript();
//Serial.println("Stop");
}
#Multi Sequence Master V2
20 0 speed
20 1 speed
20 2 speed
20 3 speed
20 5 speed
20 15 speed
20 16 speed
20 17 speed
# Main Sequence do nothing
begin
#simple_lookaround
#simple_point
#Come_Here
#Look_Around
#Point_Finger
#check_watch
#Thumbs_up
#Move_Along
repeat
### Sequence subroutines: ###
# Simple Lookaround 0
sub simple_lookaround
setSpeed
500 4224 7720 6000 7256 0 5905
7921 7921 8000 6903 0 4202
0 0 0 5367 7012 7296
0 0 0 0 0 0 frame_0..23 # Frame 0 Init
2000 5837 6420 3968 frame_15..17 # Frame 1 turn lt
2000 7296 frame_17 # Frame 2 turn Rt
2000 5615 frame_17 # Frame 3 center
2000 3968 frame_17 # Frame 1 turn lt
2000 7296 frame_17 # Frame 2 turn Rt
2000 5615 frame_17 # Frame 3 center
2000 3968 frame_17 # Frame 1 turn lt
2000 7296 frame_17 # Frame 2 turn Rt
2000 5615 frame_17 # Frame 3 center
quit
# point finger simple 1
sub simple_point
setSpeed
500 4224 7720 6000 7256 0 5905
7921 7921 8000 6903 0 4202
0 0 0 5837 6420 5615
0 0 0 0 0 0 frame_0..23 # Frame 0
1000 4688 7604 frame_15_16 # Frame 1 lower head
5000 5078 3968 3968 8000 8000 7980 frame_0_5..7_9_11 # Frame 2 point finger
500 4224 5905 7921 7921 6903 4202
5837 6420 frame_0_5..7_9_11_15_16 # Frame 0
quit
# Come Here 2
sub Come_Here
setSpeed
500 4224 7720 6000 7628 0 6000
3968 6000 6000 6000 0 6000
0 0 0 6440 5984 5632
0 0 0 0 0 0 frame_0..23 # Frame 0 init
2000 4754 7305 5147 frame_15..17 # Frame 1 look down
500 5297 8000 frame_3_5 # Frame 2 bend elbow
500 8000 8000 8000 3968 frame_6..9 # Frame 3
500 delay # Frame 4 fingers in
500 7745 3968 3968 3968 frame_5..8 # Frame 5 fingers out
500 8000 8000 8000 8000 frame_5..8 # Frame 4 fingers in
500 7745 3968 3968 3968 frame_5..8 # Frame 5 fingers out
500 8000 8000 8000 8000 frame_5..8 # Frame 4 fingers in
500 7745 3968 3968 3968 frame_5..8 # Frame 5 fingers out
500 8000 8000 8000 8000 frame_5..8 # Frame 4 fingers in
500 7745 3968 3968 3968 frame_5..8 # Frame 5 fingers out
500 4224 7720 6000 7628 0 6000
3968 6000 6000 6000 0 6000
0 0 0 6440 5984 5632
0 0 0 0 0 0 frame_0..23 # Frame 0 init
quit
# Look Around 3
sub Look_Around
setSpeed
500 4224 7720 6000 7256 0 5905
7921 7921 8000 6903 0 4202
0 0 0 5367 7012 5632
0 0 0 0 0 0 frame_0..23 # Frame 0 Init
3000 7921 7921 8000 6903 frame_6..9 # Frame 1
3000 7296 frame_17 # Frame 2
3000 3968 frame_17 # Frame 3
3000 7296 frame_17 # Frame 4
3000 5486 frame_17 # Frame 5
3000 4480 7558 frame_15_16 # Frame 6
3000 5837 6420 frame_15_16 # Frame 7
3000 3968 frame_17 # Frame 8
3000 4480 7616 frame_15_16 # Frame 9
3000 5902 6432 frame_15_16 # Frame 10
3000 7296 frame_17 # Frame 11
3000 4480 6363 frame_15_16 # Frame 12 tilt head rt
3000 5367 7012 frame_15_16 # tilt back up
3000 5276 frame_17 # Frame 13
500 4224 7720 6000 7256 0 5905
7921 7921 8000 6903 0 4202
0 0 0 5367 7012 5632
0 0 0 0 0 0 frame_0..23 # Frame 0 Init
quit
# Point 4
sub Point_Finger
setSpeed
1000 4224 7720 5964 7628 0 5905
3968 7921 8000 7412 0 6727
0 0 0 6440 5984 5632
0 0 0 0 0 0 frame_0..23 # Frame 0
2000 4688 7466 frame_15_16 # Frame Lower Head
1000 5497 7768 7588 frame_0_1_11 # Raise arm
1000 6280 6397 frame_15_16 # Frame 3 Raise Head
1000 4688 7466 frame_15_16 # Frame 4 Lower Head
1000 6280 6397 frame_15_16 # Frame 5 Raise Head
1000 4688 7466 frame_15_16 # Frame 6 Lower Head
1000 7862 frame_5 # Frame 7 rotate wrist
500 8000 frame_6 # Frame 8 pf up
500 3968 frame_6 # Frame 9 pf down
500 8000 frame_6 # Frame 10 pf up
500 3968 frame_6 # Frame 11 pf down
500 8000 frame_6 # Frame 12 pf up
500 3968 frame_6 # Frame 13 pf down
1000 4410 8000 3968 3968 4163 4281
4224 frame_0_1_5_7..9_11 # Frame 14
quit
# Sequence check watch 5
sub check_watch
setSpeed
500 4224 7720 6000 7628 0 6000
3968 6000 6000 6000 0 6000
0 0 0 6440 5984 5632
0 0 0 0 0 0 frame_0..23 # Frame 0 init
500 4923 7455 4000 frame_15..17 # Frame 1 look at helmut
1000 4969 frame_17 # Frame 2 head down center
3000 5187 7823 4288 3968 frame_0_2_3_5 # Frame 3 check watch
1000 4255 8000 frame_0_1 # Frame 4 arm down
1000 3968 frame_17 # Frame 5 turn head
500 7686 8000 8000 8000 frame_6..9 # Frame 8 fingers in
500 5572 6000 6000 6000 frame_6..9 # Frame 6 p finger out
500 7686 frame_6 # Frame 7 p finger in
500 5572 frame_6 # Frame 6 p finger out
500 7686 frame_6 # Frame 7 p finger in
500 8000 8000 8000 7616 5292 frame_7..9_16_17 # Frame 11 turn head
3000 7862 3968 3968 4026 3968 frame_5..9 # Frame 12 look at open hand
500 4224 7720 6000 7628 6000 6000
6000 6000 6440 5984 5632 frame_0..3_5_7..9_15..17 # Frame 0 init
quit
sub Thumbs_up 6
setSpeed
500 4224 7720 6000 7256 0 5905
7921 7921 8000 6903 0 4202
0 0 0 5367 7012 5632
0 0 0 0 0 0 frame_0..23 # Frame 0 Init
500 4224 5905 7921 7921 6903 4202
5093 7098 frame_0_5..7_9_11_15_16 # Frame 1 look down
1500 4923 7788 8000 5098 6962 frame_0..3_5 # Frame 2 move arm
5000 8000 8000 3968 3968 frame_6_7_9_11 # Frame 3 Thumbs up
500 4224 7720 6000 7256 0 5905
7921 7921 8000 6903 0 4202
0 0 0 5367 7012 5632
0 0 0 0 0 0 frame_0..23 # Frame 0 Init
quit
sub Move_Along
setSpeed
500 4301 7817 6000 7256 0 5298
3968 3968 3987 3968 0 3968
0 0 0 6440 5984 5632
0 0 0 0 0 0 frame_0..23 # Frame 0 init
1500 5119 7018 frame_15_16 # Frame 1 look down
1500 4288 frame_3 # Frame 2 elbow up
1000 7471 frame_2 # Frame 3 turn in
1000 5612 frame_2 # Frame 4 turn out
1000 7471 frame_2 # Frame 3 turn in
1000 5612 frame_2 # Frame 4 turn out
1000 7471 frame_2 # Frame 3 turn in
1000 5612 frame_2 # Frame 4 turn out
500 6000 7256 6440 5984 frame_2_3_15_16 # Frame 0 init
quit
# Hypnotize
sub Hypnotize
setSpeed
500 4224 7797 5964 7628 0 5984
3968 4065 3968 3968 0 3968
0 0 0 5837 6466 5632
0 0 0 0 0 0 frame_0..23 # Frame 0 init
500 7247 frame_17 # Frame 1 Head Turn rt
500 3968 frame_17 # Frame 2 Head Turn Lt
500 4480 5638 5632 frame_15..17 # Frame 3 bob rt
500 6580 7386 frame_15_16 # Frame 4 bob lt
500 4480 5638 frame_15_16 # Frame 3 bob rt
500 6580 7386 frame_15_16 # Frame 4 bob lt
500 5810 6420 frame_15_16 # Frame 7 head center
500 5218 7960 4954 frame_0_2_3 # Frame 8 bend arm up
500 4907 frame_0 # Frame 9 lower bent arm
500 4144 frame_5 # Frame 10 turn wrist down
500 5466 frame_0 # Frame 11 bent arm up
500 5016 frame_0 # Frame 12 bent arm down
500 5171 7397 5389 frame_15..17 # Frame 13
500 delay # Frame 14 head down
500 4612 5824 6443 frame_0_15_16 # Frame 15 head up arm down
500 5466 5810 6420 5632 frame_0_15..17 # Frame 11 bent arm up
500 4798 4988 7351 5098 frame_0_15..17 # Frame 17 head down arm down
500 5280 5824 6443 4840 frame_0_15..17 # Frame 18 head up arm up
500 4798 4988 7351 5098 frame_0_15..17 # Frame 17 head down arm down
500 5280 5824 6443 4840 frame_0_15..17 # Frame 18 head up arm up
500 4798 4988 7351 5098 frame_0_15..17 # Frame 17 head down arm down
500 5280 5824 6443 4840 frame_0_15..17 # Frame 18 head up arm up
500 7200 8000 frame_1_2 # Frame 23 slide arm out
500 7884 frame_1 # Frame 24 slide arm in
500 7200 frame_1 # Frame 23 slide arm out
500 7884 frame_1 # Frame 24 slide arm in
500 7200 frame_1 # Frame 23 slide arm out
500 7884 frame_1 # Frame 24 slide arm in
quit
sub setSpeed
20 0 speed
15 1 speed
20 2 speed
20 3 speed
20 5 speed
20 15 speed
20 16 speed
20 17 speed
return
#15 inputs on stack including delay
sub Init
17 servo
16 servo
15 servo
11 servo
9 servo
8 servo
7 servo
6 servo
5 servo
3 servo
2 servo
1 servo
0 servo
delay
return
sub setDefaults
setDefaultsservopositions
quit
sub setDefaultsservopostions
5616 17 servo
5984 16 servo
6440 15 servo
3968 11 servo
3968 9 servo
3968 8 servo
3968 7 servo
3968 6 servo
5905 5 servo
7628 3 servo
5964 2 servo
7720 1 servo
4224 0 servo
return
sub frame_0..23
23 servo
22 servo
21 servo
20 servo
19 servo
18 servo
17 servo
16 servo
15 servo
14 servo
13 servo
12 servo
11 servo
10 servo
9 servo
8 servo
7 servo
6 servo
5 servo
4 servo
3 servo
2 servo
1 servo
0 servo
delay
return
sub frame_15..17
17 servo
16 servo
15 servo
delay
return
sub frame_3_5
5 servo
3 servo
delay
return
sub frame_6..9
9 servo
8 servo
7 servo
6 servo
delay
return
sub frame_5..8
8 servo
7 servo
6 servo
5 servo
delay
return
sub frame_17
17 servo
delay
return
sub frame_15_16
16 servo
15 servo
delay
return
sub frame_0_2_3
3 servo
2 servo
0 servo
delay
return
sub frame_0
0 servo
delay
return
sub frame_5
5 servo
delay
return
sub frame_0_15_16
16 servo
15 servo
0 servo
delay
return
sub frame_0_15..17
17 servo
16 servo
15 servo
0 servo
delay
return
sub frame_1_2
2 servo
1 servo
delay
return
sub frame_1
1 servo
delay
return
sub frame_3
3 servo
delay
return
sub frame_2
2 servo
delay
return
sub frame_15
15 servo
delay
return
sub frame_0_1_11
11 servo
1 servo
0 servo
delay
return
sub frame_6
6 servo
delay
return
sub frame_0_1_5_7..9_11
11 servo
9 servo
8 servo
7 servo
5 servo
1 servo
0 servo
delay
return
sub frame_0_2_3_5
5 servo
3 servo
2 servo
0 servo
delay
return
sub frame_0_1
1 servo
0 servo
delay
return
sub frame_7..9_16_17
17 servo
16 servo
9 servo
8 servo
7 servo
delay
return
sub frame_5..9
9 servo
8 servo
7 servo
6 servo
5 servo
delay
return
sub frame_0..3_5_7..9_15..17
17 servo
16 servo
15 servo
9 servo
8 servo
7 servo
5 servo
3 servo
2 servo
1 servo
0 servo
delay
return
sub frame_0_5..7_9_11
11 servo
9 servo
7 servo
6 servo
5 servo
0 servo
delay
return
sub frame_0_5..7_9_11_15_16
16 servo
15 servo
11 servo
9 servo
7 servo
6 servo
5 servo
0 servo
delay
return
sub frame_0..3_5
5 servo
3 servo
2 servo
1 servo
0 servo
delay
return
sub frame_6_7_9_11
11 servo
9 servo
7 servo
6 servo
delay
return
sub frame_2_3_15_16
16 servo
15 servo
3 servo
2 servo
delay
return
Output generated in my test:
Test Maestro
went home
Play script 0
Play script 1
Status = 248 error 00000001
Status = 0 error 00000001
Play script 5
Play script 6
Play script 0
Play script 1
Play script 2
Play script 3
Play script 4
Play script 5
Play script 6
Play script 0
Play script 1
Play script 2
Play script 3
Play script 4
Status = 0 error 11111111
Status = 252 error 11111111
Play script 5
Status = 0 error 11111100
Status = 0 error 11000000
Play script 6
Status = 0 error 11000000
Play script 0
Play script 1
Play script 2
Play script 3
Play script 4
Status = 1 error 00000001
Play script 5
Play script 6
Hello.
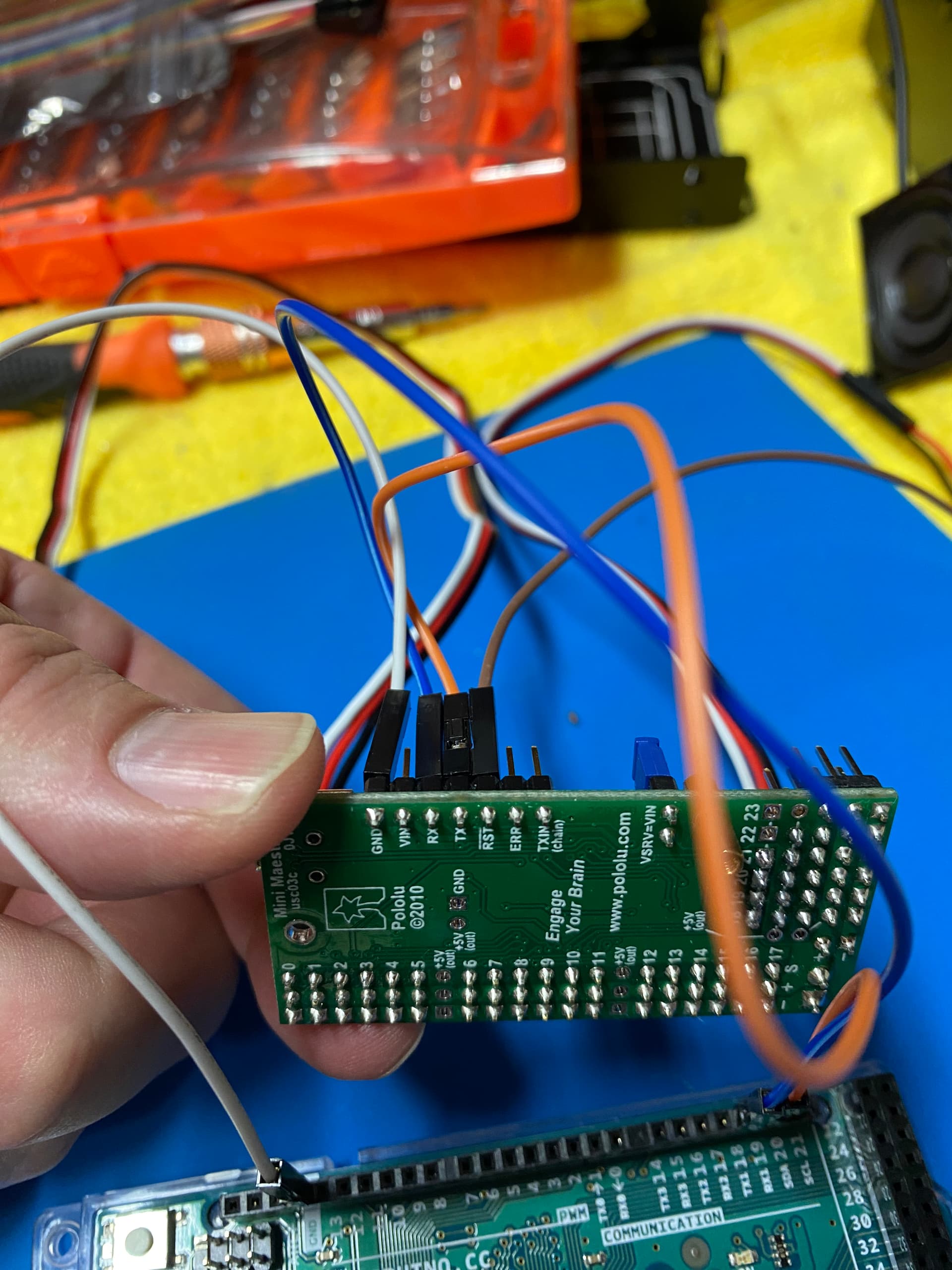
That does seem strange. Could you post a picture of your setup showing all of your connections? Since connecting the USB cables made the problem go away, I want to check that the GND pins are properly connected.
As far as the device number, it looks like you might be trying to use the serial number or something; 382748 is not a valid device number. The default device number is 12 and it can be changed to a value between 0 and 127 in the “Serial Settings” tab of the Maestro Control Center.
By the way, in case it helps in the future, you can use Serial.print(data, BIN); to print the binary representation to the Serial Monitor instead of using a separate function (although it does not print leading zeros like your printBits() function).
Brandon
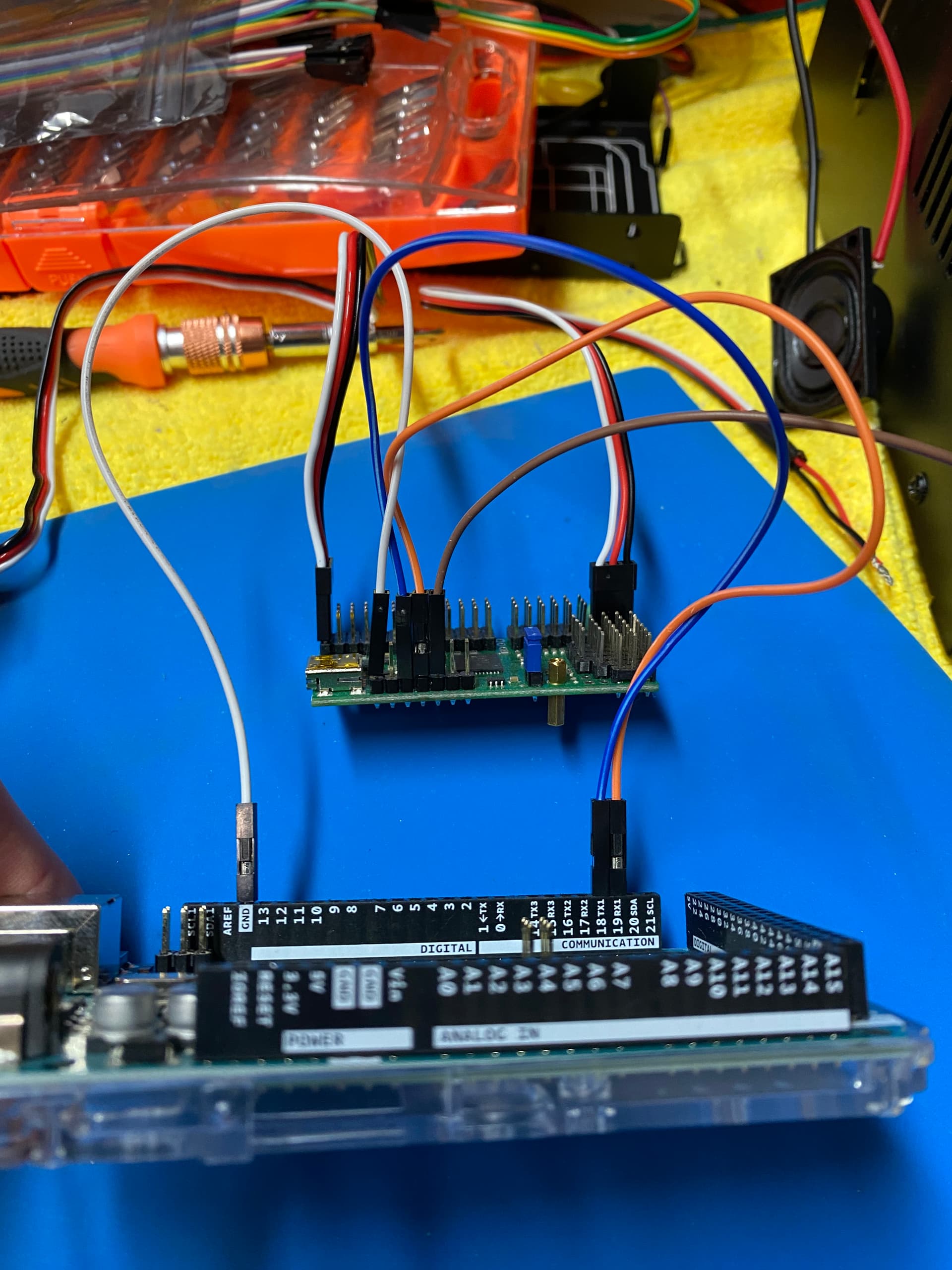
Thanks. Here is a picture of the basic setup with the servos removed to show the serial setup. The power is actually coming from the screw terminals.
Also I’m testing more with the board plugged in via usb while calling the serial commands and it’s still getting a lot of random errors. The script always starts then quickly stops and errors out
Thanks for your time
also forgot, I generally wasn’t using the device number that was a test I forgot to comment out. but it does raise the question. if I don’t have a device number am I correct in that I’m using the compact protocol based on the documentation? to use pololu protocol would I put 12 in the constructor? and would using the pololu protocol work better?
Thanks again
It looks like you have some additional connections that aren’t fully shown in your pictures; for example, the brown wire connected to the Maestro’s nRST pin is going out of frame. Also, you mentioned disconnecting things in your setup when taking the picture, and it looks like you have additional pins soldered to your Maestro. Could you simplify your system down as much as possible where the errors are still happening and post a picture of that full system without changing anything? Also, could you post a copy of your Maestro settings file and information about your power supply? You can save a copy of your settings file from the “File” drop-down menu of the Maestro Control Center software.
As far as the device number, when you do not specify a device number in the constructor of our Arduino library, it will use the compact protocol. When you specify a device number, it will use the Pololu protocol. I do not expect the Pololu protocol to “work better” in regard to the errors you are getting. The main benefit of the Pololu protocol is to address individual Maestros in your system when you have more than one.
Brandon
Thanks Brandon, sorry about that pic the brown wire goes from rst on maestro to pin 10 for resetting the board. I have the actual setup inside the robot now so it may take me a bit to recreate the setup but I can as I have duplicate boards. it basically has a 25V power supply that runs the bigger servo’s then I have that running though a pololu 6V, 5.5A Step-Down Voltage Regulator D36V50F6 that supplies 6V to the pololu which is also configured to run off one power source with the jumper. I have a separate line running from the main power supply to a Pololu Adjustable 4-12V Step-Up/Step-Down Voltage Regulator S18V20ALV for a different servo that takes more power. Your suggestion about the additional power pins got me thinking. I have 3 lines running off that, one to a 5v fan, and one to a smaller servo just for power that takes 5v, and a third to an adafruit soundboard. I disconnected the soundboard and hooked up a battery and it solved most of the errors but still getting some glitches once and a while. I probably was pulling too much power from that is that a good guess? I’ll also reply with my setup
Thanks again!
Here’s the settings file and for some reason it shows as numbers in the display when I save but I copied in the text from the text file
<!--Pololu Maestro servo controller settings file, http://www.pololu.com/catalog/product/1350-->
<UscSettings version="1">
<NeverSuspend>false</NeverSuspend>
<SerialMode>UART_FIXED_BAUD_RATE</SerialMode>
<FixedBaudRate>9600</FixedBaudRate>
<SerialTimeout>0</SerialTimeout>
<EnableCrc>false</EnableCrc>
<SerialDeviceNumber>12</SerialDeviceNumber>
<SerialMiniSscOffset>0</SerialMiniSscOffset>
<EnablePullups>false</EnablePullups>
<Channels MiniMaestroServoPeriod="80000" ServoMultiplier="1">
<!--Period = 20 ms-->
<!--Channel 0-->
<Channel name="Shoulder Paral" mode="Servo" min="4224" max="7424" homemode="Ignore" home="4224" speed="20" acceleration="0" neutral="6000" range="1905" />
<!--Channel 1-->
<Channel name="Shoulder Perp" mode="Servo" min="6016" max="8000" homemode="Ignore" home="6016" speed="20" acceleration="0" neutral="6016" range="1905" />
<!--Channel 2-->
<Channel name="Bicep" mode="Servo" min="3968" max="8000" homemode="Ignore" home="3968" speed="20" acceleration="0" neutral="6000" range="1905" />
<!--Channel 3-->
<Channel name="Elbow" mode="Servo" min="4288" max="8000" homemode="Ignore" home="4288" speed="20" acceleration="0" neutral="6000" range="1905" />
<!--Channel 4-->
<Channel name="" mode="Servo" min="3968" max="10688" homemode="Off" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 5-->
<Channel name="Wrist" mode="Servo" min="3968" max="8000" homemode="Ignore" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 6-->
<Channel name="Point Finger" mode="Servo" min="3968" max="8000" homemode="Ignore" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 7-->
<Channel name="Middle Finger" mode="Servo" min="3968" max="8000" homemode="Off" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 8-->
<Channel name="Ring Finger" mode="Servo" min="3968" max="8000" homemode="Off" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 9-->
<Channel name="Thumb Outer" mode="Servo" min="3968" max="8000" homemode="Ignore" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 10-->
<Channel name="" mode="Servo" min="3968" max="8000" homemode="Off" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 11-->
<Channel name="Thumb Inner" mode="Servo" min="3968" max="8000" homemode="Off" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 12-->
<Channel name="" mode="Servo" min="3968" max="8000" homemode="Off" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 13-->
<Channel name="" mode="Servo" min="3968" max="8000" homemode="Off" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 14-->
<Channel name="" mode="Servo" min="3968" max="8000" homemode="Off" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 15-->
<Channel name="Lt Neck" mode="Servo" min="4480" max="7168" homemode="Goto" home="5824" speed="20" acceleration="0" neutral="6000" range="1905" />
<!--Channel 16-->
<Channel name="Rt Neck" mode="Servo" min="5248" max="7616" homemode="Goto" home="6432" speed="20" acceleration="0" neutral="6000" range="1905" />
<!--Channel 17-->
<Channel name="Neck Turn" mode="Servo" min="3968" max="7296" homemode="Goto" home="5632" speed="20" acceleration="0" neutral="6000" range="1905" />
<!--Channel 18-->
<Channel name="" mode="Servo" min="3968" max="8000" homemode="Off" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 19-->
<Channel name="" mode="Servo" min="3968" max="8000" homemode="Off" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 20-->
<Channel name="" mode="Servo" min="5248" max="8000" homemode="Off" home="5248" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 21-->
<Channel name="" mode="Servo" min="3968" max="8000" homemode="Off" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 22-->
<Channel name="" mode="Servo" min="3968" max="8000" homemode="Off" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
<!--Channel 23-->
<Channel name="" mode="Servo" min="3968" max="8000" homemode="Off" home="3968" speed="0" acceleration="0" neutral="6000" range="1905" />
</Channels>
<Sequences>
<Sequence name="Come Here">
<Frame name="Frame 0 init" duration="500">4224 7720 6000 7628 0 6000 3968 6000 6000 6000 0 6000 0 0 0 6440 5984 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 1 look down" duration="2000">4224 7720 6000 7628 0 6000 3968 6000 6000 6000 0 6000 0 0 0 4754 7305 5147 0 0 0 0 0 0</Frame>
<Frame name="Frame 2 bend elbow" duration="500">4224 7720 6000 5297 0 8000 3968 6000 6000 6000 0 6000 0 0 0 4754 7305 5147 0 0 0 0 0 0</Frame>
<Frame name="Frame 3" duration="500">4224 7720 6000 5297 0 8000 8000 8000 8000 3968 0 6000 0 0 0 4754 7305 5147 0 0 0 0 0 0</Frame>
<Frame name="Frame 4 fingers in" duration="500">4224 7720 6000 5297 0 8000 8000 8000 8000 3968 0 6000 0 0 0 4754 7305 5147 0 0 0 0 0 0</Frame>
<Frame name="Frame 5 fingers out" duration="500">4224 7720 6000 5297 0 7745 3968 3968 3968 3968 0 6000 0 0 0 4754 7305 5147 0 0 0 0 0 0</Frame>
<Frame name="Frame 4 fingers in" duration="500">4224 7720 6000 5297 0 8000 8000 8000 8000 3968 0 6000 0 0 0 4754 7305 5147 0 0 0 0 0 0</Frame>
<Frame name="Frame 5 fingers out" duration="500">4224 7720 6000 5297 0 7745 3968 3968 3968 3968 0 6000 0 0 0 4754 7305 5147 0 0 0 0 0 0</Frame>
<Frame name="Frame 4 fingers in" duration="500">4224 7720 6000 5297 0 8000 8000 8000 8000 3968 0 6000 0 0 0 4754 7305 5147 0 0 0 0 0 0</Frame>
<Frame name="Frame 5 fingers out" duration="500">4224 7720 6000 5297 0 7745 3968 3968 3968 3968 0 6000 0 0 0 4754 7305 5147 0 0 0 0 0 0</Frame>
</Sequence>
<Sequence name="Hypnotize">
<Frame name="Frame 0 init" duration="500">4224 7797 5964 7628 0 5984 3968 4065 3968 3968 0 3968 0 0 0 5837 6466 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 1 Head Turn rt" duration="500">4224 7797 5964 7628 0 5984 3968 4065 3968 3968 0 3968 0 0 0 5837 6466 7247 0 0 0 0 0 0</Frame>
<Frame name="Frame 2 Head Turn Lt" duration="500">4224 7797 5964 7628 0 5984 3968 4065 3968 3968 0 3968 0 0 0 5837 6466 3968 0 0 0 0 0 0</Frame>
<Frame name="Frame 3 bob rt" duration="500">4224 7797 5964 7628 0 5984 3968 4065 3968 3968 0 3968 0 0 0 4480 5638 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 4 bob lt" duration="500">4224 7797 5964 7628 0 5984 3968 4065 3968 3968 0 3968 0 0 0 6580 7386 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 3 bob rt" duration="500">4224 7797 5964 7628 0 5984 3968 4065 3968 3968 0 3968 0 0 0 4480 5638 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 4 bob lt" duration="500">4224 7797 5964 7628 0 5984 3968 4065 3968 3968 0 3968 0 0 0 6580 7386 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 7 head center" duration="500">4224 7797 5964 7628 0 5984 3968 4065 3968 3968 0 3968 0 0 0 5810 6420 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 8 bend arm up" duration="500">5218 7797 7960 4954 0 5984 3968 4065 3968 3968 0 3968 0 0 0 5810 6420 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 9 lower bent arm" duration="500">4907 7797 7960 4954 0 5984 3968 4065 3968 3968 0 3968 0 0 0 5810 6420 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 10 turn wrist down" duration="500">4907 7797 7960 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5810 6420 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 11 bent arm up" duration="500">5466 7797 7960 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5810 6420 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 12 bent arm down" duration="500">5016 7797 7960 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5810 6420 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 13" duration="500">5016 7797 7960 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5171 7397 5389 0 0 0 0 0 0</Frame>
<Frame name="Frame 14 head down" duration="500">5016 7797 7960 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5171 7397 5389 0 0 0 0 0 0</Frame>
<Frame name="Frame 15 head up arm down" duration="500">4612 7797 7960 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5824 6443 5389 0 0 0 0 0 0</Frame>
<Frame name="Frame 11 bent arm up" duration="500">5466 7797 7960 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5810 6420 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 17 head down arm down" duration="500">4798 7797 7960 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 4988 7351 5098 0 0 0 0 0 0</Frame>
<Frame name="Frame 18 head up arm up" duration="500">5280 7797 7960 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5824 6443 4840 0 0 0 0 0 0</Frame>
<Frame name="Frame 17 head down arm down" duration="500">4798 7797 7960 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 4988 7351 5098 0 0 0 0 0 0</Frame>
<Frame name="Frame 18 head up arm up" duration="500">5280 7797 7960 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5824 6443 4840 0 0 0 0 0 0</Frame>
<Frame name="Frame 17 head down arm down" duration="500">4798 7797 7960 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 4988 7351 5098 0 0 0 0 0 0</Frame>
<Frame name="Frame 18 head up arm up" duration="500">5280 7797 7960 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5824 6443 4840 0 0 0 0 0 0</Frame>
<Frame name="Frame 23 slide arm out" duration="500">5280 7200 8000 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5824 6443 4840 0 0 0 0 0 0</Frame>
<Frame name="Frame 24 slide arm in" duration="500">5280 7884 8000 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5824 6443 4840 0 0 0 0 0 0</Frame>
<Frame name="Frame 23 slide arm out" duration="500">5280 7200 8000 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5824 6443 4840 0 0 0 0 0 0</Frame>
<Frame name="Frame 24 slide arm in" duration="500">5280 7884 8000 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5824 6443 4840 0 0 0 0 0 0</Frame>
<Frame name="Frame 23 slide arm out" duration="500">5280 7200 8000 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5824 6443 4840 0 0 0 0 0 0</Frame>
<Frame name="Frame 24 slide arm in" duration="500">5280 7884 8000 4954 0 4144 3968 4065 3968 3968 0 3968 0 0 0 5824 6443 4840 0 0 0 0 0 0</Frame>
</Sequence>
<Sequence name="Look Around">
<Frame name="Frame 0" duration="3000">5984 5905 6000 7256 0 5905 3987 3968 3968 3968 0 4202 0 0 0 5367 7012 5615 0 0 0 0 0 0</Frame>
<Frame name="Frame 1" duration="3000">5984 5905 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5367 7012 5615 0 0 0 0 0 0</Frame>
<Frame name="Frame 2" duration="3000">5984 5905 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5367 7012 7296 0 0 0 0 0 0</Frame>
<Frame name="Frame 3" duration="3000">5984 5905 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5367 7012 3968 0 0 0 0 0 0</Frame>
<Frame name="Frame 4" duration="3000">5984 5905 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5367 7012 7296 0 0 0 0 0 0</Frame>
<Frame name="Frame 5" duration="3000">5984 5905 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5367 7012 5486 0 0 0 0 0 0</Frame>
<Frame name="Frame 6" duration="3000">5984 5905 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 4480 7558 5486 0 0 0 0 0 0</Frame>
<Frame name="Frame 7" duration="3000">5984 5905 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5837 6420 5486 0 0 0 0 0 0</Frame>
<Frame name="Frame 8" duration="3000">5984 5905 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5837 6420 3968 0 0 0 0 0 0</Frame>
<Frame name="Frame 9" duration="3000">5984 5905 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 4480 7616 3968 0 0 0 0 0 0</Frame>
<Frame name="Frame 10" duration="3000">5984 5905 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5902 6432 3968 0 0 0 0 0 0</Frame>
<Frame name="Frame 11" duration="3000">5984 5905 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5902 6432 7296 0 0 0 0 0 0</Frame>
<Frame name="Frame 12" duration="3000">5984 5905 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 4480 6363 7296 0 0 0 0 0 0</Frame>
<Frame name="Frame 13" duration="3000">5984 5905 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 4480 6363 5276 0 0 0 0 0 0</Frame>
<Frame name="Frame 14" duration="3000">5984 5905 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5915 6363 5276 0 0 0 0 0 0</Frame>
</Sequence>
<Sequence name="Move along">
<Frame name="Frame 0 init" duration="500">4301 7817 6000 7256 0 5298 3968 3968 3987 3968 0 3968 0 0 0 6440 5984 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 1 look down" duration="1500">4301 7817 6000 7256 0 5298 3968 3968 3987 3968 0 3968 0 0 0 5119 7018 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 2 elbow up" duration="1500">4301 7817 6000 4288 0 5298 3968 3968 3987 3968 0 3968 0 0 0 5119 7018 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 3 turn in" duration="1000">4301 7817 7471 4288 0 5298 3968 3968 3987 3968 0 3968 0 0 0 5119 7018 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 4 turn out" duration="1000">4301 7817 5612 4288 0 5298 3968 3968 3987 3968 0 3968 0 0 0 5119 7018 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 3 turn in" duration="1000">4301 7817 7471 4288 0 5298 3968 3968 3987 3968 0 3968 0 0 0 5119 7018 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 4 turn out" duration="1000">4301 7817 5612 4288 0 5298 3968 3968 3987 3968 0 3968 0 0 0 5119 7018 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 3 turn in" duration="1000">4301 7817 7471 4288 0 5298 3968 3968 3987 3968 0 3968 0 0 0 5119 7018 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 4 turn out" duration="1000">4301 7817 5612 4288 0 5298 3968 3968 3987 3968 0 3968 0 0 0 5119 7018 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 0 init" duration="500">4301 7817 6000 7256 0 5298 3968 3968 3987 3968 0 3968 0 0 0 6440 5984 5632 0 0 0 0 0 0</Frame>
</Sequence>
<Sequence name="Point Finger">
<Frame name="Frame 0" duration="1000">4224 7720 5964 7628 0 5905 3968 7921 8000 7412 0 6727 0 0 0 6440 5984 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame Lower Head" duration="2000">4224 7720 5964 7628 0 5905 3968 7921 8000 7412 0 6727 0 0 0 4688 7466 5632 0 0 0 0 0 0</Frame>
<Frame name="Raise arm" duration="1000">5497 7768 5964 7628 0 5905 3968 7921 8000 7412 0 7588 0 0 0 4688 7466 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 3 Raise Head" duration="1000">5497 7768 5964 7628 0 5905 3968 7921 8000 7412 0 7588 0 0 0 6280 6397 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 4 Lower Head" duration="1000">5497 7768 5964 7628 0 5905 3968 7921 8000 7412 0 7588 0 0 0 4871 7282 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 5 Raise Head" duration="1000">5497 7768 5964 7628 0 5905 3968 7921 8000 7412 0 7588 0 0 0 6437 6006 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 6 Lower Head" duration="1000">5497 7768 5964 7628 0 5905 3968 7921 8000 7412 0 7588 0 0 0 5028 6983 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 7 rotate wrist" duration="1000">5497 7768 5964 7628 0 7862 3968 7921 8000 7412 0 7588 0 0 0 5028 6983 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 8 pf up" duration="1000">5497 7768 5964 7628 0 7862 8000 7921 8000 7412 0 7588 0 0 0 5028 6983 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 9 pf down" duration="1000">5497 7768 5964 7628 0 7862 3968 7921 8000 7412 0 7588 0 0 0 5028 6983 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 10 pf up" duration="1000">5497 7768 5964 7628 0 7862 7784 7921 8000 7412 0 7588 0 0 0 5028 6983 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 11 pf down" duration="1000">5497 7768 5964 7628 0 7862 4124 7921 8000 7412 0 7588 0 0 0 5028 6983 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 12 pf up" duration="1000">5497 7768 5964 7628 0 7862 7823 7921 8000 7412 0 7588 0 0 0 5028 6983 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 13 pf down" duration="1000">5497 7768 5964 7628 0 7862 4007 7921 8000 7412 0 7588 0 0 0 5028 6983 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 14" duration="1000">4410 7903 5964 7628 0 5670 4007 4085 4163 4281 0 4046 0 0 0 5028 6983 5632 0 0 0 0 0 0</Frame>
</Sequence>
<Sequence name="point finger simple">
<Frame name="Frame 0" duration="500">4224 7720 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5837 6420 5615 0 0 0 0 0 0</Frame>
<Frame name="Frame 1 lower head" duration="1000">4224 7720 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 4688 7604 5615 0 0 0 0 0 0</Frame>
<Frame name="Frame 2 point finger" duration="5000">5078 7720 6000 7256 0 3968 3968 8000 8000 8000 0 7980 0 0 0 4688 7604 5615 0 0 0 0 0 0</Frame>
<Frame name="Frame 0" duration="500">4224 7720 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5837 6420 5615 0 0 0 0 0 0</Frame>
</Sequence>
<Sequence name="Sequence 4 check watch">
<Frame name="Frame 0 init" duration="500">4224 7720 6000 7628 0 6000 3968 6000 6000 6000 0 6000 0 0 0 6440 5984 5632 0 0 0 0 0 0</Frame>
<Frame name="Frame 1 look at helmut" duration="500">4224 7720 6000 7628 0 6000 3968 6000 6000 6000 0 6000 0 0 0 4923 7455 4000 0 0 0 0 0 0</Frame>
<Frame name="Frame 2 head down center" duration="1000">4224 7720 6000 7628 0 6000 3968 6000 6000 6000 0 6000 0 0 0 4923 7455 4969 0 0 0 0 0 0</Frame>
<Frame name="Frame 3 check watch" duration="3000">5187 7720 7823 4288 0 3968 3968 6000 6000 6000 0 6000 0 0 0 4923 7455 4969 0 0 0 0 0 0</Frame>
<Frame name="Frame 4 arm down" duration="1000">4255 8000 7823 4288 0 3968 3968 6000 6000 6000 0 6000 0 0 0 4923 7455 4969 0 0 0 0 0 0</Frame>
<Frame name="Frame 5 turn head" duration="1000">4255 8000 7823 4288 0 3968 3968 6000 6000 6000 0 6000 0 0 0 4923 7455 3968 0 0 0 0 0 0</Frame>
<Frame name="Frame 8 fingers in" duration="500">4255 8000 7823 4288 0 3968 7686 8000 8000 8000 0 6000 0 0 0 4923 7455 3968 0 0 0 0 0 0</Frame>
<Frame name="Frame 6 p finger out" duration="500">4255 8000 7823 4288 0 3968 5572 6000 6000 6000 0 6000 0 0 0 4923 7455 3968 0 0 0 0 0 0</Frame>
<Frame name="Frame 7 p finger in" duration="500">4255 8000 7823 4288 0 3968 7686 6000 6000 6000 0 6000 0 0 0 4923 7455 3968 0 0 0 0 0 0</Frame>
<Frame name="Frame 6 p finger out" duration="500">4255 8000 7823 4288 0 3968 5572 6000 6000 6000 0 6000 0 0 0 4923 7455 3968 0 0 0 0 0 0</Frame>
<Frame name="Frame 7 p finger in" duration="500">4255 8000 7823 4288 0 3968 7686 6000 6000 6000 0 6000 0 0 0 4923 7455 3968 0 0 0 0 0 0</Frame>
<Frame name="Frame 11 turn head" duration="500">4255 8000 7823 4288 0 3968 7686 8000 8000 8000 0 6000 0 0 0 4923 7616 5292 0 0 0 0 0 0</Frame>
<Frame name="Frame 12 look at open hand" duration="3000">4255 8000 7823 4288 0 7862 3968 3968 4026 3968 0 6000 0 0 0 4923 7616 5292 0 0 0 0 0 0</Frame>
<Frame name="Frame 0 init" duration="500">4224 7720 6000 7628 0 6000 3968 6000 6000 6000 0 6000 0 0 0 6440 5984 5632 0 0 0 0 0 0</Frame>
</Sequence>
<Sequence name="Simple Lookaround">
<Frame name="Frame 0 Init" duration="500">4224 7720 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5367 7012 7296 0 0 0 0 0 0</Frame>
<Frame name="Frame 1 turn lt" duration="2000">4224 7720 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5837 6420 3968 0 0 0 0 0 0</Frame>
<Frame name="Frame 2 turn Rt" duration="2000">4224 7720 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5837 6420 7296 0 0 0 0 0 0</Frame>
<Frame name="Frame 3 center" duration="2000">4224 7720 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5837 6420 5615 0 0 0 0 0 0</Frame>
<Frame name="Frame 1 turn lt" duration="2000">4224 7720 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5837 6420 3968 0 0 0 0 0 0</Frame>
<Frame name="Frame 2 turn Rt" duration="2000">4224 7720 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5837 6420 7296 0 0 0 0 0 0</Frame>
<Frame name="Frame 3 center" duration="2000">4224 7720 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5837 6420 5615 0 0 0 0 0 0</Frame>
<Frame name="Frame 1 turn lt" duration="2000">4224 7720 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5837 6420 3968 0 0 0 0 0 0</Frame>
<Frame name="Frame 2 turn Rt" duration="2000">4224 7720 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5837 6420 7296 0 0 0 0 0 0</Frame>
<Frame name="Frame 3 center" duration="2000">4224 7720 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5837 6420 5615 0 0 0 0 0 0</Frame>
</Sequence>
<Sequence name="Thumbs Up">
<Frame name="Frame 0 init" duration="500">5078 7720 6000 7256 0 3968 3968 8000 8000 8000 0 7980 0 0 0 4688 7604 5615 0 0 0 0 0 0</Frame>
<Frame name="Frame 1 look down" duration="500">4224 7720 6000 7256 0 5905 7921 7921 8000 6903 0 4202 0 0 0 5093 7098 5615 0 0 0 0 0 0</Frame>
<Frame name="Frame 2 move arm" duration="1500">4923 7788 8000 5098 0 6962 7921 7921 8000 6903 0 4202 0 0 0 5093 7098 5615 0 0 0 0 0 0</Frame>
<Frame name="Frame 3 Thumbs up" duration="5000">4923 7788 8000 5098 0 6962 8000 8000 8000 3968 0 3968 0 0 0 5093 7098 5615 0 0 0 0 0 0</Frame>
<Frame name="Frame 0 init" duration="500">5078 7720 6000 7256 0 3968 3968 8000 8000 8000 0 7980 0 0 0 4688 7604 5615 0 0 0 0 0 0</Frame>
</Sequence>
</Sequences>
<Script ScriptDone="true">#Multi Sequence Master V2
20 0 speed
20 1 speed
20 2 speed
20 3 speed
20 5 speed
20 15 speed
20 16 speed
20 17 speed
# Main Sequence do nothing
begin
# simple_lookaround
# simple_point
# Come_Here
# Look_Around
#Point_Finger
# check_watch
# Thumbs_up
# Move_Along
repeat
### Sequence subroutines: ###
# Simple Lookaround 0
sub simple_lookaround
setSpeed
500 4224 7720 6000 7256 5905
7921 7921 8000 6903 4202
5367 7012 7296 init # Frame 0 Init
2000 5837 6420 3968 frame_15..17 # Frame 1 turn lt
2000 7296 frame_17 # Frame 2 turn Rt
2000 5615 frame_17 # Frame 3 center
2000 3968 frame_17 # Frame 1 turn lt
2000 7296 frame_17 # Frame 2 turn Rt
2000 5615 frame_17 # Frame 3 center
2000 3968 frame_17 # Frame 1 turn lt
2000 7296 frame_17 # Frame 2 turn Rt
2000 5615 frame_17 # Frame 3 center
quit
# point finger simple 1
sub simple_point
setSpeed
500 4224 7720 6000 7256 5905
7921 7921 8000 6903 4202
5837 6420 5615 init
1000 4688 7604 frame_15_16 # Frame 1 lower head
5000 5078 3968 3968 8000 8000 7980 frame_0_5..7_9_11 # Frame 2 point finger
500 4224 5905 7921 7921 6903 4202
5837 6420 frame_0_5..7_9_11_15_16 # Frame 0
quit
# Come Here 2
sub Come_Here
setSpeed
500 4224 7720 6000 7628 6000
3968 6000 6000 6000 6000
6440 5984 5632 init # Frame 0 init
2000 4754 7305 5147 frame_15..17 # Frame 1 look down
500 5297 8000 frame_3_5 # Frame 2 bend elbow
500 8000 8000 8000 3968 frame_6..9 # Frame 3
500 delay # Frame 4 fingers in
500 7745 3968 3968 3968 frame_5..8 # Frame 5 fingers out
500 8000 8000 8000 8000 frame_5..8 # Frame 4 fingers in
500 7745 3968 3968 3968 frame_5..8 # Frame 5 fingers out
500 8000 8000 8000 8000 frame_5..8 # Frame 4 fingers in
500 7745 3968 3968 3968 frame_5..8 # Frame 5 fingers out
500 8000 8000 8000 8000 frame_5..8 # Frame 4 fingers in
500 7745 3968 3968 3968 frame_5..8 # Frame 5 fingers out
500 4224 7720 6000 7628 6000
3968 6000 6000 6000 6000
6440 5984 5632 init # Frame 0 init
quit
# Look Around 3
sub Look_Around
setSpeed
500 4224 7720 6000 7256 5905
7921 7921 8000 6903 4202
5367 7012 5632 init # Frame 0 Init
3000 7921 7921 8000 6903 frame_6..9 # Frame 1
3000 7296 frame_17 # Frame 2
3000 3968 frame_17 # Frame 3
3000 7296 frame_17 # Frame 4
3000 5486 frame_17 # Frame 5
3000 4480 7558 frame_15_16 # Frame 6
3000 5837 6420 frame_15_16 # Frame 7
3000 3968 frame_17 # Frame 8
3000 4480 7616 frame_15_16 # Frame 9
3000 5902 6432 frame_15_16 # Frame 10
3000 7296 frame_17 # Frame 11
3000 4480 6363 frame_15_16 # Frame 12 tilt head rt
3000 5367 7012 frame_15_16 # tilt back up
3000 5276 frame_17 # Frame 13
500 4224 7720 6000 7256 5905
7921 7921 8000 6903 4202
5367 7012 5632 init # Frame 0 Init
quit
# Point Finger 4
sub Point_Finger
setSpeed
1000 4224 7720 5964 7628 5905
3968 7921 8000 7412 6727
6440 5984 5632 init # Frame 0
2000 4688 7466 frame_15_16 # Frame Lower Head
1000 5497 7768 7588 frame_0_1_11 # Raise arm
1000 6280 6397 frame_15_16 # Frame 3 Raise Head
1000 4688 7466 frame_15_16 # Frame 4 Lower Head
1000 6280 6397 frame_15_16 # Frame 5 Raise Head
1000 4688 7466 frame_15_16 # Frame 6 Lower Head
1000 7862 frame_5 # Frame 7 rotate wrist
500 8000 frame_6 # Frame 8 pf up
500 3968 frame_6 # Frame 9 pf down
500 8000 frame_6 # Frame 10 pf up
500 3968 frame_6 # Frame 11 pf down
500 8000 frame_6 # Frame 12 pf up
500 3968 frame_6 # Frame 13 pf down
1000 4410 8000 3968 3968 4163 4281
4224 frame_0_1_5_7..9_11 # Frame 14
quit
# Sequence check watch 5
sub check_watch
setSpeed
500 4224 7720 6000 7628 0 6000
3968 6000 6000 6000 0 6000
0 0 0 6440 5984 5632
0 0 0 0 0 0 frame_0..23 # Frame 0 init
500 4923 7455 4000 frame_15..17 # Frame 1 look at helmut
1000 4969 frame_17 # Frame 2 head down center
3000 5187 7823 4288 3968 frame_0_2_3_5 # Frame 3 check watch
1000 4255 8000 frame_0_1 # Frame 4 arm down
1000 3968 frame_17 # Frame 5 turn head
500 7686 8000 8000 8000 frame_6..9 # Frame 8 fingers in
500 5572 6000 6000 6000 frame_6..9 # Frame 6 p finger out
500 7686 frame_6 # Frame 7 p finger in
500 5572 frame_6 # Frame 6 p finger out
500 7686 frame_6 # Frame 7 p finger in
500 8000 8000 8000 7616 5292 frame_7..9_16_17 # Frame 11 turn head
3000 7862 3968 3968 4026 3968 frame_5..9 # Frame 12 look at open hand
500 4224 7720 6000 7628 6000 6000
6000 6000 6440 5984 5632 frame_0..3_5_7..9_15..17 # Frame 0 init
quit
# Sequence Thumbs up 6
sub Thumbs_up
setSpeed
500 4224 7720 6000 7256 0 5905
7921 7921 8000 6903 0 4202
0 0 0 5367 7012 5632
0 0 0 0 0 0 frame_0..23 # Frame 0 Init
500 4224 5905 7921 7921 6903 4202
5093 7098 frame_0_5..7_9_11_15_16 # Frame 1 look down
1500 4923 7788 8000 5098 6962 frame_0..3_5 # Frame 2 move arm
5000 8000 8000 3968 3968 frame_6_7_9_11 # Frame 3 Thumbs up
500 4224 7720 6000 7256 5905
7921 7921 8000 6903 4202
5367 7012 5632 init # Frame 0 Init
quit
# Sequence Move along 7
sub Move_Along
setSpeed
500 4301 7817 6000 7256 5298
3968 3968 3968 3968 3968
6440 5984 5632 init # Frame 0 init
1500 5119 7018 frame_15_16 # Frame 1 look down
1500 4288 frame_3 # Frame 2 elbow up
1000 7471 frame_2 # Frame 3 turn in
1000 5612 frame_2 # Frame 4 turn out
1000 7471 frame_2 # Frame 3 turn in
1000 5612 frame_2 # Frame 4 turn out
1000 7471 frame_2 # Frame 3 turn in
1000 5612 frame_2 # Frame 4 turn out
500 6000 7256 6440 5984 frame_2_3_15_16 # Frame 0 init
quit
# Hypnotize
sub Hypnotize
setSpeed
500 4224 7797 5964 7628 0 5984
3968 4065 3968 3968 0 3968
0 0 0 5837 6466 5632
0 0 0 0 0 0 frame_0..23 # Frame 0 init
500 7247 frame_17 # Frame 1 Head Turn rt
500 3968 frame_17 # Frame 2 Head Turn Lt
500 4480 5638 5632 frame_15..17 # Frame 3 bob rt
500 6580 7386 frame_15_16 # Frame 4 bob lt
500 4480 5638 frame_15_16 # Frame 3 bob rt
500 6580 7386 frame_15_16 # Frame 4 bob lt
500 5810 6420 frame_15_16 # Frame 7 head center
500 5218 7960 4954 frame_0_2_3 # Frame 8 bend arm up
500 4907 frame_0 # Frame 9 lower bent arm
500 4144 frame_5 # Frame 10 turn wrist down
500 5466 frame_0 # Frame 11 bent arm up
500 5016 frame_0 # Frame 12 bent arm down
500 5171 7397 5389 frame_15..17 # Frame 13
500 delay # Frame 14 head down
500 4612 5824 6443 frame_0_15_16 # Frame 15 head up arm down
500 5466 5810 6420 5632 frame_0_15..17 # Frame 11 bent arm up
500 4798 4988 7351 5098 frame_0_15..17 # Frame 17 head down arm down
500 5280 5824 6443 4840 frame_0_15..17 # Frame 18 head up arm up
500 4798 4988 7351 5098 frame_0_15..17 # Frame 17 head down arm down
500 5280 5824 6443 4840 frame_0_15..17 # Frame 18 head up arm up
500 4798 4988 7351 5098 frame_0_15..17 # Frame 17 head down arm down
500 5280 5824 6443 4840 frame_0_15..17 # Frame 18 head up arm up
500 7200 8000 frame_1_2 # Frame 23 slide arm out
500 7884 frame_1 # Frame 24 slide arm in
500 7200 frame_1 # Frame 23 slide arm out
500 7884 frame_1 # Frame 24 slide arm in
500 7200 frame_1 # Frame 23 slide arm out
500 7884 frame_1 # Frame 24 slide arm in
quit
#15 inputs on stack including delay
sub Init
17 servo
16 servo
15 servo
11 servo
9 servo
8 servo
7 servo
6 servo
5 servo
3 servo
2 servo
1 servo
0 servo
delay
return
sub setDefaults
setDefaultServos
quit
sub setDefaultServos
5616 17 servo
5984 16 servo
6440 15 servo
3968 11 servo
3968 9 servo
3968 8 servo
3968 7 servo
3968 6 servo
5905 5 servo
7628 3 servo
5964 2 servo
7720 1 servo
4224 0 servo
return
sub setSpeed
20 0 speed
15 1 speed
20 2 speed
20 3 speed
20 5 speed
20 15 speed
20 16 speed
20 17 speed
return
sub frame_0..23
#setSpeed
23 servo
22 servo
21 servo
20 servo
19 servo
18 servo
17 servo
16 servo
15 servo
14 servo
13 servo
12 servo
11 servo
10 servo
9 servo
8 servo
7 servo
6 servo
5 servo
4 servo
3 servo
2 servo
1 servo
0 servo
delay
return
sub frame_15..17
17 servo
16 servo
15 servo
delay
return
sub frame_3_5
5 servo
3 servo
delay
return
sub frame_6..9
9 servo
8 servo
7 servo
6 servo
delay
return
sub frame_5..8
8 servo
7 servo
6 servo
5 servo
delay
return
sub frame_17
17 servo
delay
return
sub frame_15_16
16 servo
15 servo
delay
return
sub frame_0_2_3
3 servo
2 servo
0 servo
delay
return
sub frame_0
0 servo
delay
return
sub frame_5
5 servo
delay
return
sub frame_0_15_16
16 servo
15 servo
0 servo
delay
return
sub frame_0_15..17
17 servo
16 servo
15 servo
0 servo
delay
return
sub frame_1_2
2 servo
1 servo
delay
return
sub frame_1
1 servo
delay
return
sub frame_3
3 servo
delay
return
sub frame_2
2 servo
delay
return
sub frame_15
15 servo
delay
return
sub frame_0_1_11
11 servo
1 servo
0 servo
delay
return
sub frame_6
6 servo
delay
return
sub frame_0_1_5_7..9_11
11 servo
9 servo
8 servo
7 servo
5 servo
1 servo
0 servo
delay
return
sub frame_0_2_3_5
5 servo
3 servo
2 servo
0 servo
delay
return
sub frame_0_1
1 servo
0 servo
delay
return
sub frame_7..9_16_17
17 servo
16 servo
9 servo
8 servo
7 servo
delay
return
sub frame_5..9
9 servo
8 servo
7 servo
6 servo
5 servo
delay
return
sub frame_0..3_5_7..9_15..17
17 servo
16 servo
15 servo
9 servo
8 servo
7 servo
5 servo
3 servo
2 servo
1 servo
0 servo
delay
return
sub frame_0_5..7_9_11
11 servo
9 servo
7 servo
6 servo
5 servo
0 servo
delay
return
sub frame_0_5..7_9_11_15_16
16 servo
15 servo
11 servo
9 servo
7 servo
6 servo
5 servo
0 servo
delay
return
sub frame_0..3_5
5 servo
3 servo
2 servo
1 servo
0 servo
delay
return
sub frame_6_7_9_11
11 servo
9 servo
7 servo
6 servo
delay
return
sub frame_2_3_15_16
16 servo
15 servo
3 servo
2 servo
delay
return</Script>
</UscSettings>
Just to clarify, are you saying you had a fan, a servo, and an Adafruit soundboard being powered from the 5V(out) pin on the Maestro? The 5V (out) pin is supplied from the on-board regulator whenever VIN is powered, and on the Mini Maestro there is only about 50 mA available for powering other devices, as described in the “Mini Maestro Pinout and Components” section of the Maestro user’s guide. 50mA is almost certainly not enough to power the devices you mentioned, so that could very well be the cause of the problem.
Brandon