
I am selecting a stepper motor in order to open a valve. The stepper motor shaft will be coupled to a valve shaft.
We would like to open the valve in 0.2-0.3 seconds. The output shaft must turn 4 revolutions in order to completely open the valve. This comes out to 800-1200 rpm (5300-8000pps for a 200 step motor). I will also need about 8 oz-in of torque to turn the valve shaft.
I’m currently looking at stepper motor #1209 (pololu.com/product/1209) and believe that it should serve my requirements. I would run the motor in full-stepping mode in order to get a little more torque out.
I was looking at the torque speed curves, but there seem to be two different conflicting torque speed curves.
One is on the description page of the motor (a.pololu-files.com/picture/0J229 … 88e1f0d242)
{kind=link}
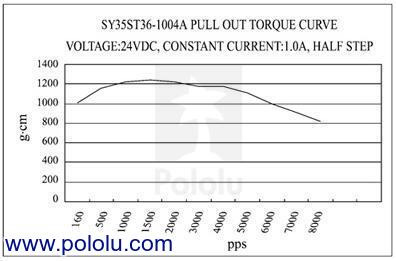
The other is in the spec sheet (pololu.com/file/0J689/SY35ST36-1004A.pdf)
I realize the units for torque in each graph are different but I converted a couple separate values and they aren’t the same. In any case the shape of the curves are not the same. As far as I can tell, the parameters of each curve are the same (24VDC, Constant Current 1.0A and half-stepping mode).
What gives?
A couple other questions:
Is there a maximum voltage I can use to drive the stepper motor? At first I thought the rated voltage was that maximum but research tells me this is not the case.
On the other hand, I believe that the rated current (1A) is the maximum current. Can anyone confirm? So I will need to use active current limiting on my stepper motor driver to keep the current under 1A, especially if I go up to high voltages.
I was planning on using an arduino to drive the stepper motor. I also believe that I may have to use acceleration limiting. So instead of stepping right at 800-1200 rpm I should start at a safe speed and work my way up to my top speed. How do I figure out a safe speed to start the stepper at, and how can I determine how fast I can accelerate up to 800/1200rpm?