It does not sound like the drivers are malfunctioning, especially since all three give the same behavior.
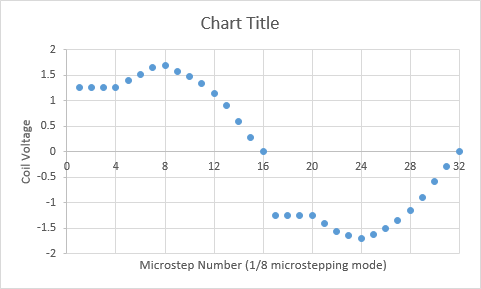
I plotted those values and (ah-ha!) it looks like your driver is having trouble maintaining a voltage below 1.26V when the driver is in slow decay mode (which is the mode the driver operates in when increase the coil current for the next step). That plot should approximate a nice sine wave, but right now, the power cannot switch on and off fast enough in slow decay mode to do that. Using a lower voltage power supply (like 9V) will allow the driver to use a higher PWM duty cycle to step the input voltage down to the voltage required to drive the coils, which should improve the performance. Also, increasing the current limit would increase the peak voltage of that sine wave, so the problematic region would be smaller. The A4988 will provide a little more current than the DRV8824, but I’m not sure if the switching performance is any better. The DRV8834 stepper driver will work with lower voltage power sources than the DRV8824 and A4988, so you also might consider that.
Also, this blog post discusses using diodes in series with the stepper motor to raise the threshold voltage at which current flows, which seems to have worked OK for them.
-Nathan