
Dear expert please help
The following picture is the fraction of the robot path , in the simplify path the robot does not take the “S” path properly , it will take turn around as sensor go away from the path as per the red line is showing in the picture please help
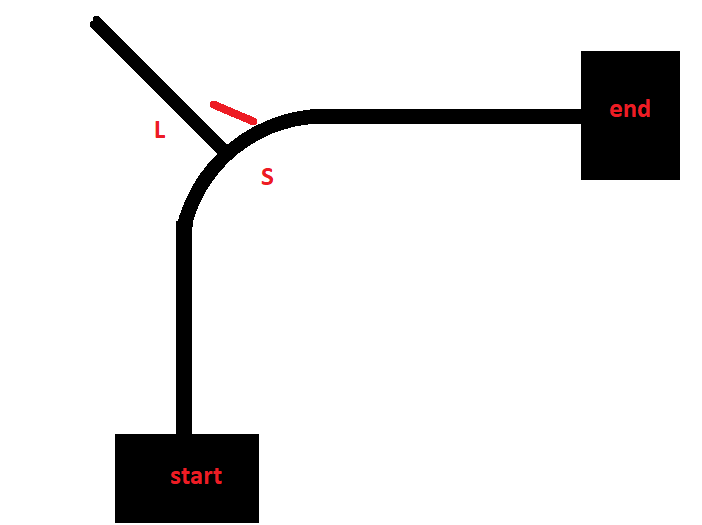
Ideally, the robot’s sensor should never end up in the position you’re indicating. If the “L” path is causing your robot to veer off course, then I suspect your robot is probably not identifying the intersection and instead just trying to follow the line normally (in which case, your line sensor readings would get thrown off by the entire left side of the sensor seeing a line briefly).
It is hard to give any specific advice beyond that, but an initial troubleshooting step you can try is having your robot do something to indicate when it finds an intersection (such as lighting up an LED) and seeing if the “L” path is getting properly flagged as an intersection or not.
Brandon
Thanks for prompt reply
Yes I think during the simplify path robot should travel line normally at S but in this case the robot does not take sharp turn but when i put the robot in the path only have bend then it takes sharp turns
please advise
I do not really have any additional advice based on the information you’ve given. I suggest doing some debugging like I mentioned in my previous post to determine where your robot is going wrong. Slowing down your robot and adding some debugging steps to determine the actual cause of the problem is probably the best way to go. For example, is it identifying the “L” path as an intersection properly? Perhaps it is and the problem is with the recording and simplifying of the path during the first run through.
Brandon
1 Like