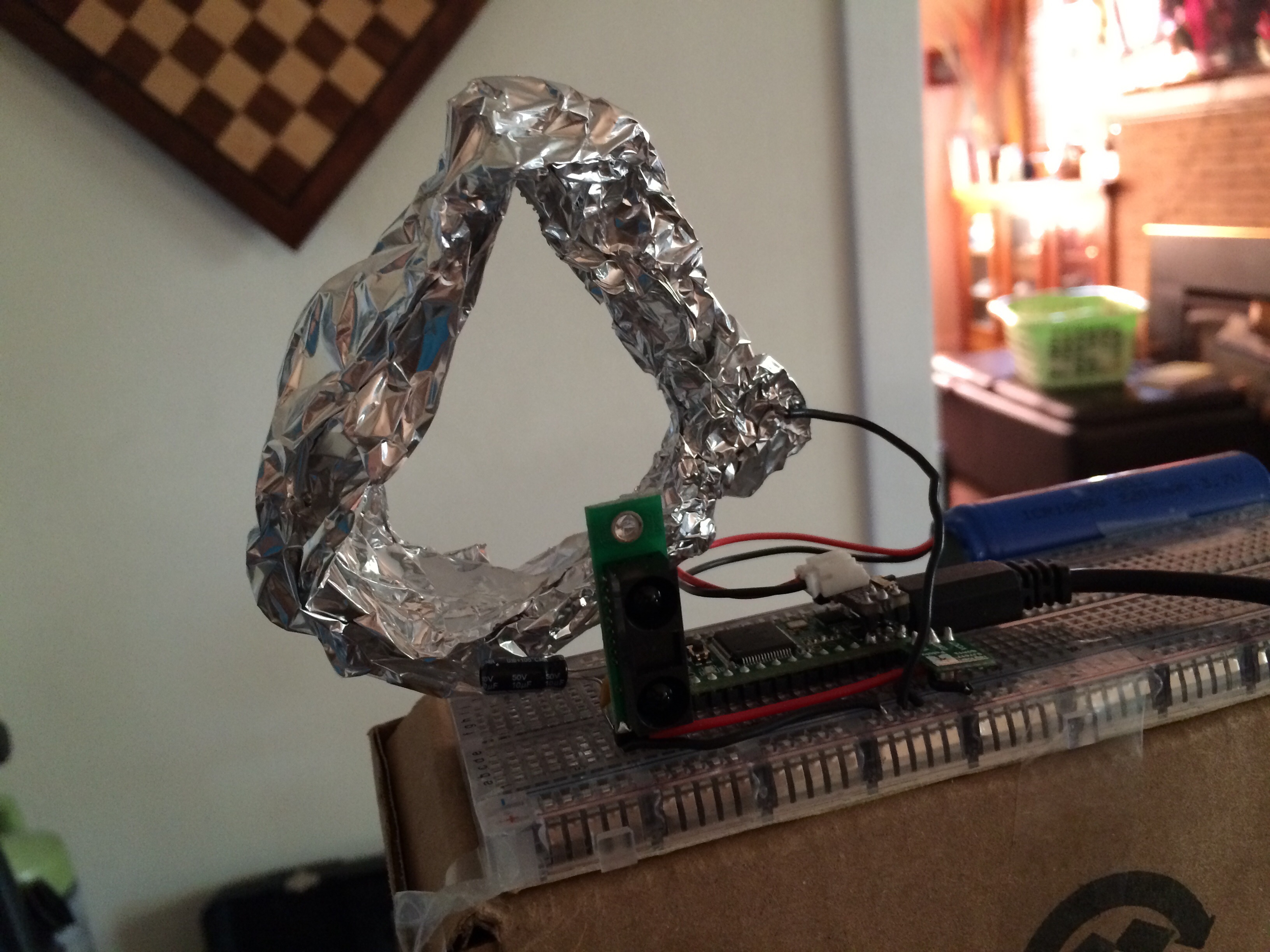
Update: The antennae effect is only with the ir sensor. One (or more) of the pins on the top left of the board and top right of the board are effected by electrostatic interference. I’ve since wrapped it in grounded aluminum tape (insulated from the IR sensor) and it nullifies the issue completely giving me more accurate readings when something is nearby and more accurate readings all around even when nothing is nearby.
I also mentioned in one of my videos earlier that there’s a random blip I assumed was coming from the teensy and I would have to deal with that, unfortunately it looks like that too is coming from the IR sensor itself.
So since wrapping it in aluminum, I’ve plugged it in to read the raw reads with the ir reciever covered with electrical tape (to get true 0): I now get a solid reading most of the time of 2, 3, & 4 (NICE!)
However… I’ve focused my sights on pinpointing the consistently timed blip, and I’m wondering if I can get more information about it.
To pinpoint the fluctuations I first tried to isolate it:
Test 1: See if it’s the sensor by removing the sensor and plugging the analog-in pin into ground.
Result: Consistent reading of 2-3 no blip
(So the blip is in the sensor unless it’s in the supply voltage and passing through the ir sensor)
Test 2: See if its the supply voltage by plugging the supply voltage into a 2 15ohm resistor voltage devider (to get a reading below 1024) and then into the analogread pin
Result: I get a solid 533-537 which is well… close to half 1024 (max read and represents 3.3v) … but nevertheless, is stable and means my variation is only ~12mV.
Sounds good. Still no blip, the blip must be in the IR sensor:
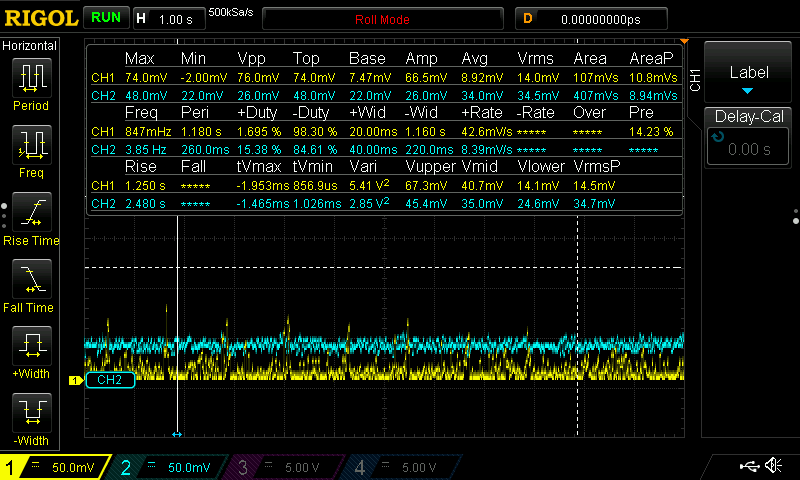
Plugged the ir sensor back in with the ir reciever covered in electrical tape the readings are mostly 2-3 still (exactly as they should be.) but the perfectly timed voltage blip is back:
It’s a very consistent and perfectly timed pulse of 8 voltage spikes. The voltage spike is always ~350mV and the 8 (i assume bit) pulse happens ~66 times a second. This seems like processing feedback from the ir sensor itself, given the perfect timing, spacing and always 8 blips. I doubt there is a way to nullify this before dealing with it in software but I’m curious if pololu is aware of it. ~66 x8 = ~528 ~350mV blips a second, given it only mucks up a sliver of time but it would be good to avoid it. Any idea if this is improvable without just working with it in software?
That being said I have a feeling the answer is going to be “So what, deal with it.” - beggars can’t be choosers.
I’ll deal with it in my averaging, but thought I’d share at this point: here’s raw feed with the IR reciever covering 1 second. If you put it in a good text reader like sublime text you can get a visualization of it if you zoom out and see the one digit values turn into 3 digit values during the blip. Its a perfectly spaced pulse of 8. So this isn’t just random interference and it’s coming from the sensor with certainty since this test immediately follows me taking a constant reading of 2-3 from analogread of ground and then an analogread of my voltage source with only a variance never outside of 12mV. Also I’ve double checked that the ir sensor aluminum tape shielding I’ve added is not a variable producing this issue. I have a 2nd pololu ir sensor without the shielding that produces the same 8 pulses.
Thanks again for all the help and input it’s great being able to have a conversation while working on this and in the end I hope it might help others.
Oh also if anyone else is reading this: the capacitors going over voltage and ground seemed to do nothing for me so I’ve removed them. Besides the issues detailed above, and the static interference issues the caps weren’t necessary and the readings are clean and consistent without them.
Kabe