Hi roboteers!
I have been working on a new hexapod for a few weeks now, and this morning the final parts of the puzzle arrived.
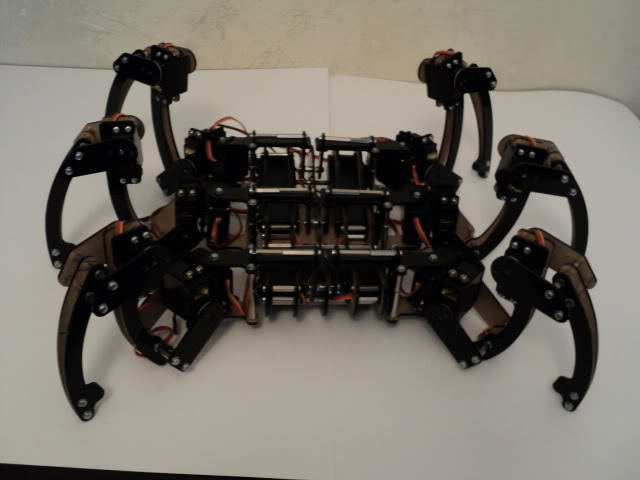
So this is my new 4 DOF Hexapod - Scuttle
As it is rather different to most hexapods I will break its design down into components.
*Ignore the messy wires. But I’ve got a lot of work left
Body
The body is made of five plates spaced with Hex stand-offs.
It houses 6 Servos which give the extra DOF over a standard hexapod.

Down the Center plate there are brackets that brace the Hips

On the under side is a void for the electronics and battery.

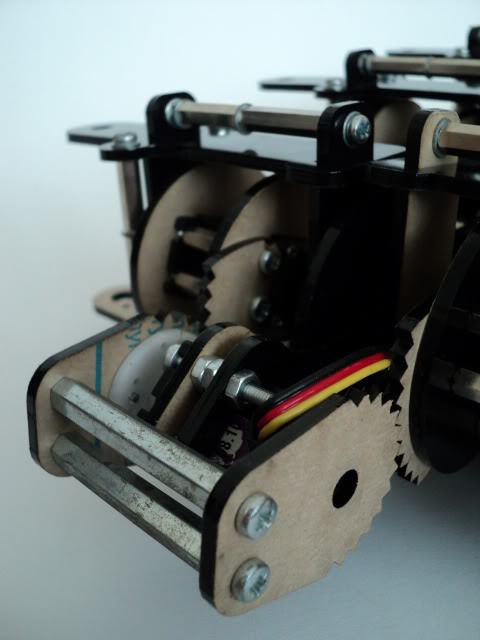
Hips
Made from interlocking plates braced with Hex stand-offs.
For these pictures the rear plate has been swapped with another front plate.
When assembled correctly its the rear that attaches to the center body plate.


Assembled Body and Hips

The following pictuires show the Hips twisting in a couple of different directions.



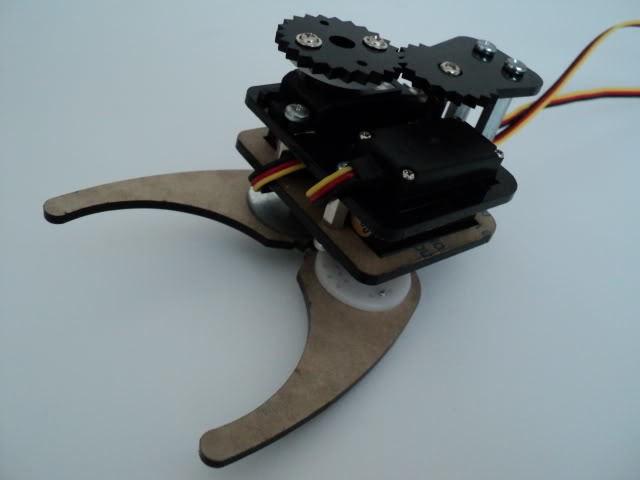
Leg’s
Femur’s
In a change to the norm I have decided to mount the Knee servo on the Femur.

The double plated Femur id held stable wih a rear bearing.


Another reason this hexapod is different to most is that the Front, Middle and Rear legs are all of differing lengths.
This can be seen below, Front, Middle Rear respectively.
As welll as the Legs being different lengths the hips are at different heights as well.

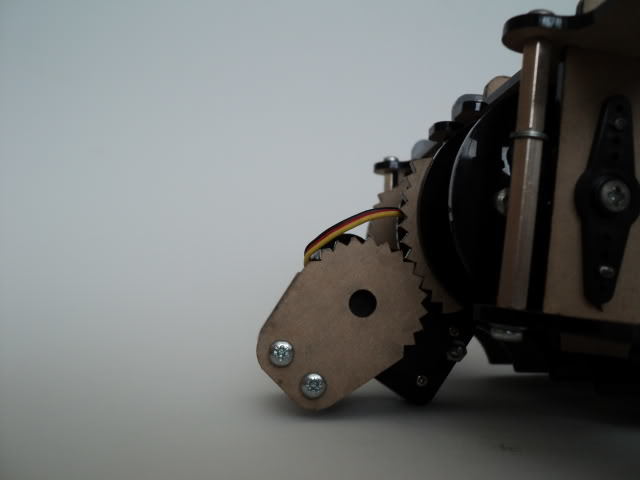
Tibia’s

The double plated Tibia is held stable wih a rear bearing.


Here you can see the differing lengths of Tibia. Front, Middle and rear respectively.

Assembled Leg

The Inside curve of the Tibia is matched exactly with the outside curve of the Femur.

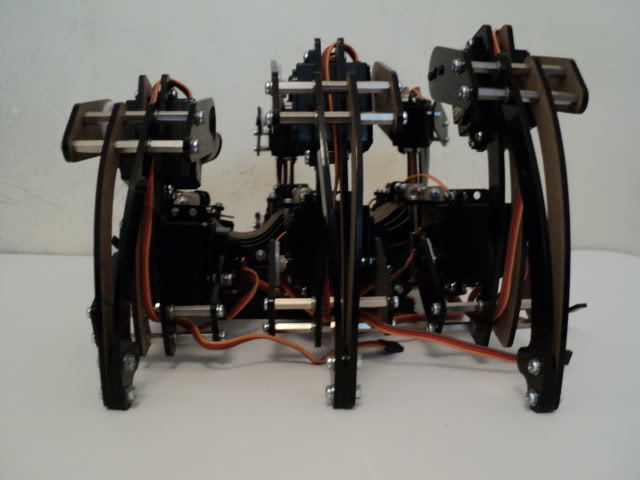
Full Assembly

Side on with legs spread.

Side on with legs aligned
A repeat of the hip rotations with the legs attached.



As well as the Hardware redesign I have been rewriting my Hex Code. its about 70% complete.
But it will have;
6 Dof Body transformations with control of the location of the point of rotation
3 Dof Locomotion with five speed ccontrollable gaits
- Tripod
- Wave
- Ripple
- Quadripple
- Scuttle - My own gait designed to show off the fact the legs are different lengths )
Single Leg and Dual leg control.
PS3 six-axis and Android Input devices
I also have a pan/tilt head with mandables on the way.

Please let me know what you think. ![]()