Hi,
I would like to buy some parts to create mannequins that pose and dance in time with songs.
MICROCONTROLLER
I’m in love with your Mini Maestro 24-Channel USB Servo Controller (Assembled) even though the software won’t work on my Macbook.
This will be the controller inside each of my Robot Mannequins.
I will have four mannequins that will each dance to a song - I will program their moves (choreography). I assume that the microcontroller software uses a timecode system so that all robots dance in time when the music begins.
SERIES LINK
The four mannequins will stand side by side in a row, and I will need to buy something that links them in a series. Please advise which product is best.
POWER
I assume that the power must be 6V for each servo, microcontroller and everything else, so I will need either batteries or power transformers for the wall socket, or at the very least, an adaptor that plugs into the microcontroller so that it can be plugged into the power source.
SERVOS & ACTUATORS
My mannequins will require servos for the following movements (please note that motors marked with a * are desirable because the dance moves would be more human and fluid - if there are such things as single servo motors that are able to ‘draw shapes’ to incorporate up/down and left/right without the need for combining two servos together please let me know) :
- Head bend forward/back
- Neck rotate left/right
- *Head bend left/right
- *Neck slide left/right
- *Neck slide forward/back
- *Left Shoulder rotate
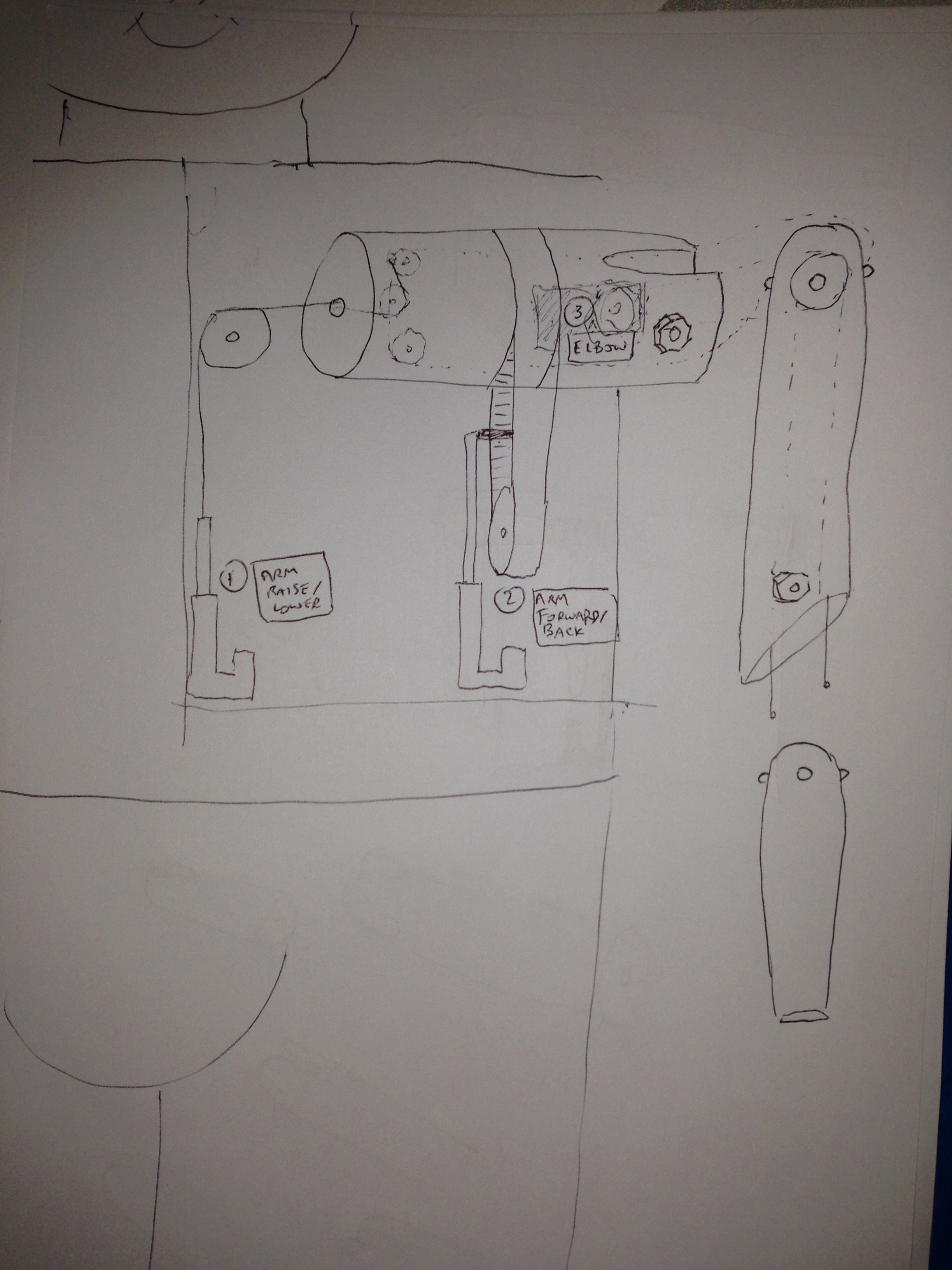
- Left upper arm raise/lower (this requires a strong actuator on a see saw construction like this: https://www.youtube.com/watch?v=vWn5nc5AS9s
- Left upper arm rotate (this requires the same amount of torque as above but I’m not sure how to do it)
- Left elbow raise/lower
- *Left wrist raise/lower
- Left wrist rotate
- *Right Shoulder rotate
- Right upper arm raise/lower (this requires a strong actuator on a see saw construction like this: https://www.youtube.com/watch?v=vWn5nc5AS9s
- Right upper arm rotate (this requires the same amount of torque as above but I’m not sure how to do it)
- Right elbow raise/lower
- *Right wrist raise/lower
- Right wrist rotate
- *Lower back rotate
- *Lower back slide forward/back
- *Lower back slide left/right
- Base plate under mannequin feet rotate
The legs do not animate. The torso clicks onto the legs, which are bolted to the rotating circular base plates and act as the tabletop for the upper half where all the robotics will be located. A rectangle timber base can contain any hand or movement detection switches, microcontrollers, series links, batteries or power cables. The rectangle timber base will be constructed wide enough for four mannequins to dance together side by side on 4 independently rotating circular base plates, with cables running up inside the legs of each mannequin. When the torso is click-locked onto the legs, the wires will connect the power and switches.
JOINS AND ASSEMBLY GEAR
I intend to use fibreglass mannequins and cut them to allow for greater motion, so the housing will be solid, but in terms of joins and see saws etc required for servos and actuators, I need advice on what I need to buy so everything is solid and reliable for fast, fluid dance moves.
SWITCHES
Either motion controlled switches or hand controlled switches to turn the entire system off and on PLUS a menu system/switch toggler to choose the song/animation set
LIGHTING
LED lights could be programmed into any remaining MicroController Ports and positioned outside of the robots to illuminate them in time with the music to appropriate dance moves.
Please advise me on all the parts I need to buy for my four dancing mannequins. I am guessing that the Mini Maestro 24-Channel USB Servo Controller (Assembled) powered by 6V power supplies will be the first things I need.