[quote=“jb_norman”]I would recommend a hydraulic ram or an actuator, both can easily be made, the first requires a lathe or a welder, you find 2 pipes one pipes fits inside the other and is a shorter length, the shorter length has each end closed(welded) and with a lathe (optional) cut a groove at one end for an O ring or weld some tags to hold the O ring, this becomes the piston of the ram.
Of course your driving power is pressure , but your hold torque becomes compression.
An actuator is nothing more than a thread and nut (can be more complex) and simple the driving force is the motors rotation, you holding torque is the nut and rods thread.
The ram has less complexity and also less accuracy the flip side is the actuator has higher accuracy & more complexity (chatter).
If speed is not necessarily desired but accuracy kind of is, then a worm drive might be a better (cheaper) option, Mitsubishi make the BEST! worm drives for the Magna series of cars more to the point the electric window drives. $5-10 from a wreckers is the norm , they are configured as right angle to the worm drive , they have no SLOP! , and the stator on the worm is only pressed and glued, therefore easily removable or left intact there is enough shaft inside the motor housing.[/quote]
Thanks JB. I thought about linear actuators but they look very, very slow in the videos I saw. My mannequin wants to move at human speed (preferably dancing speed). Having said this, my current design uses so much cable because I don’t trust the shoulder pivot screw with a firmly attached pulley to the upper arm on a belt-to-servo system to be light enough to simply rotate. If it does, that would be awesome, because I fear that my long cables will really slow her down, and I will need to modify the Torxis servos so they can wind cable reliably. This in itself is problematic because the Torxis horn is attached via a weak clamp that you can loosen with an allen key but the shoe tightener snaps so easily yet the horn cannot be removed. If I can’t get the horn off then I can’t open the damn thing to cut the rotation stopper off the potentiometer.
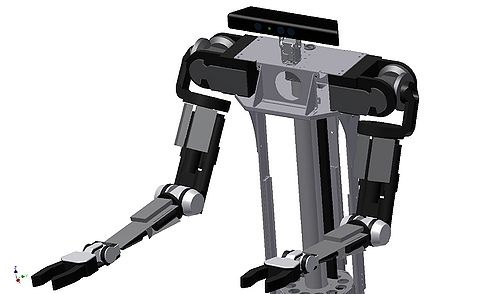
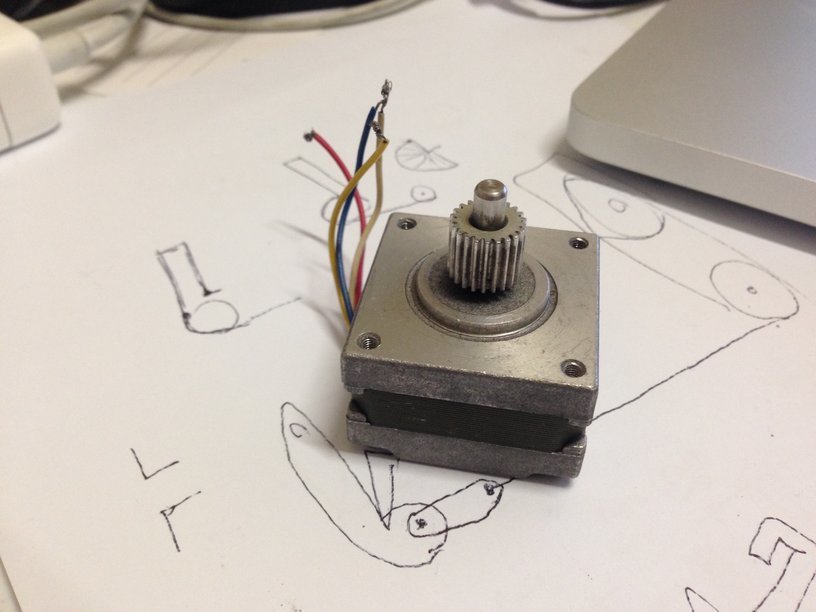
As for hydraulics, I think they would be noisy and I would need to abandon all my work so far. I am curious about stepper motors, because at least they are shaped in a semi usable way (unlike the ridiculously useless shape of servo motors):
I love the cheapness of stepper motors from car wipers and windows from wreckers, but I would love to know that I just didn’t waste so much time and money on what I’ve done so far.
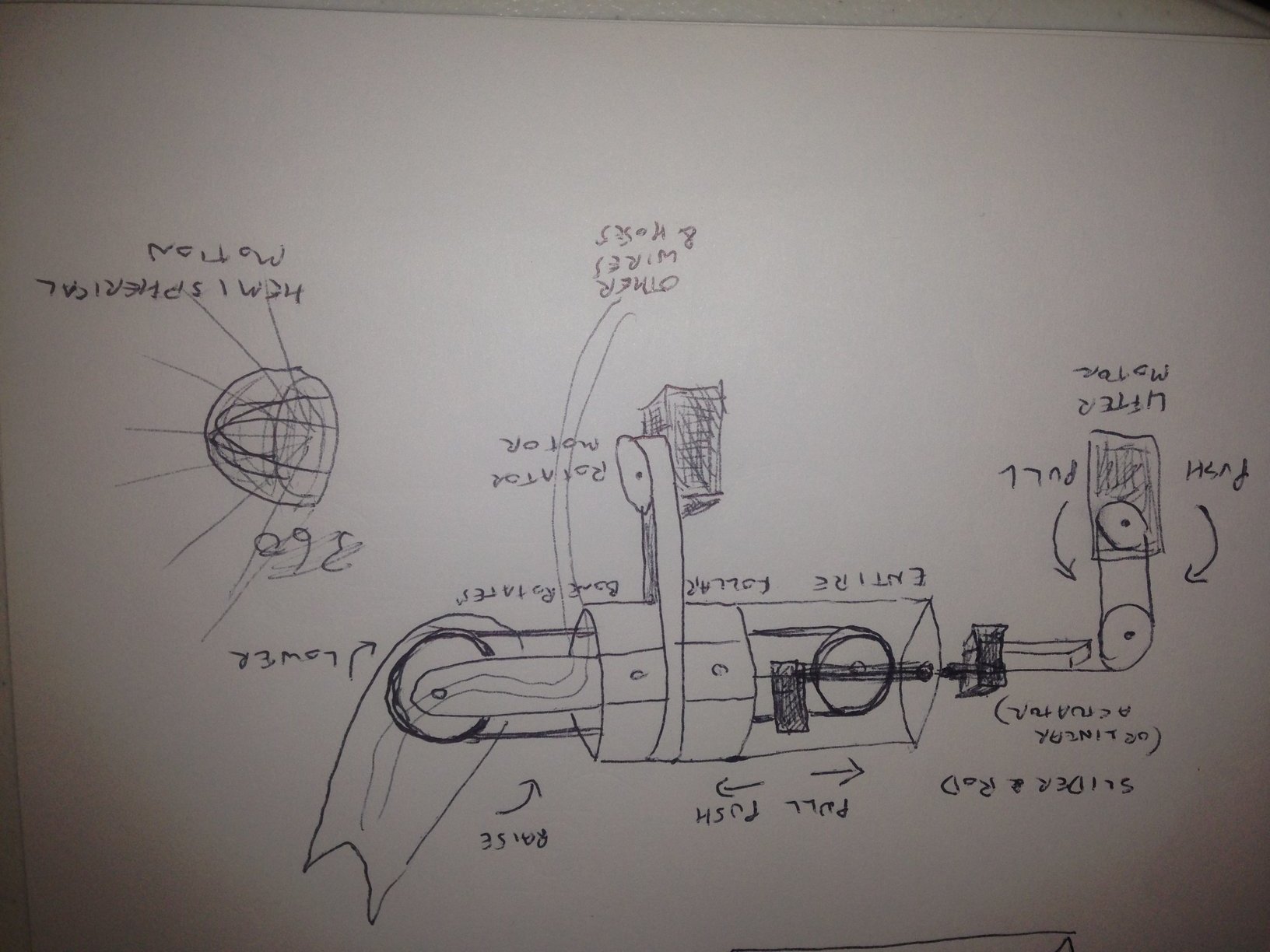
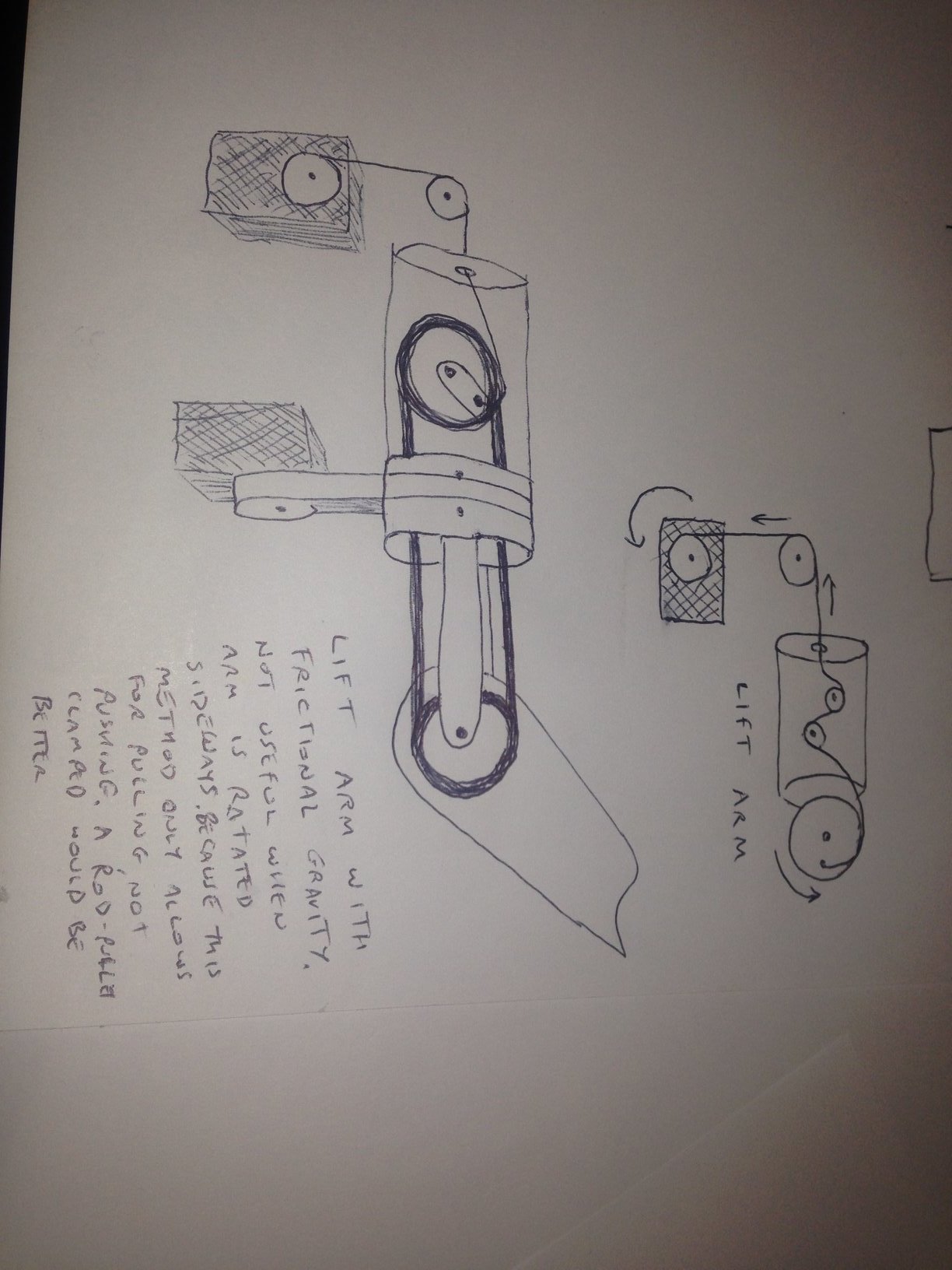
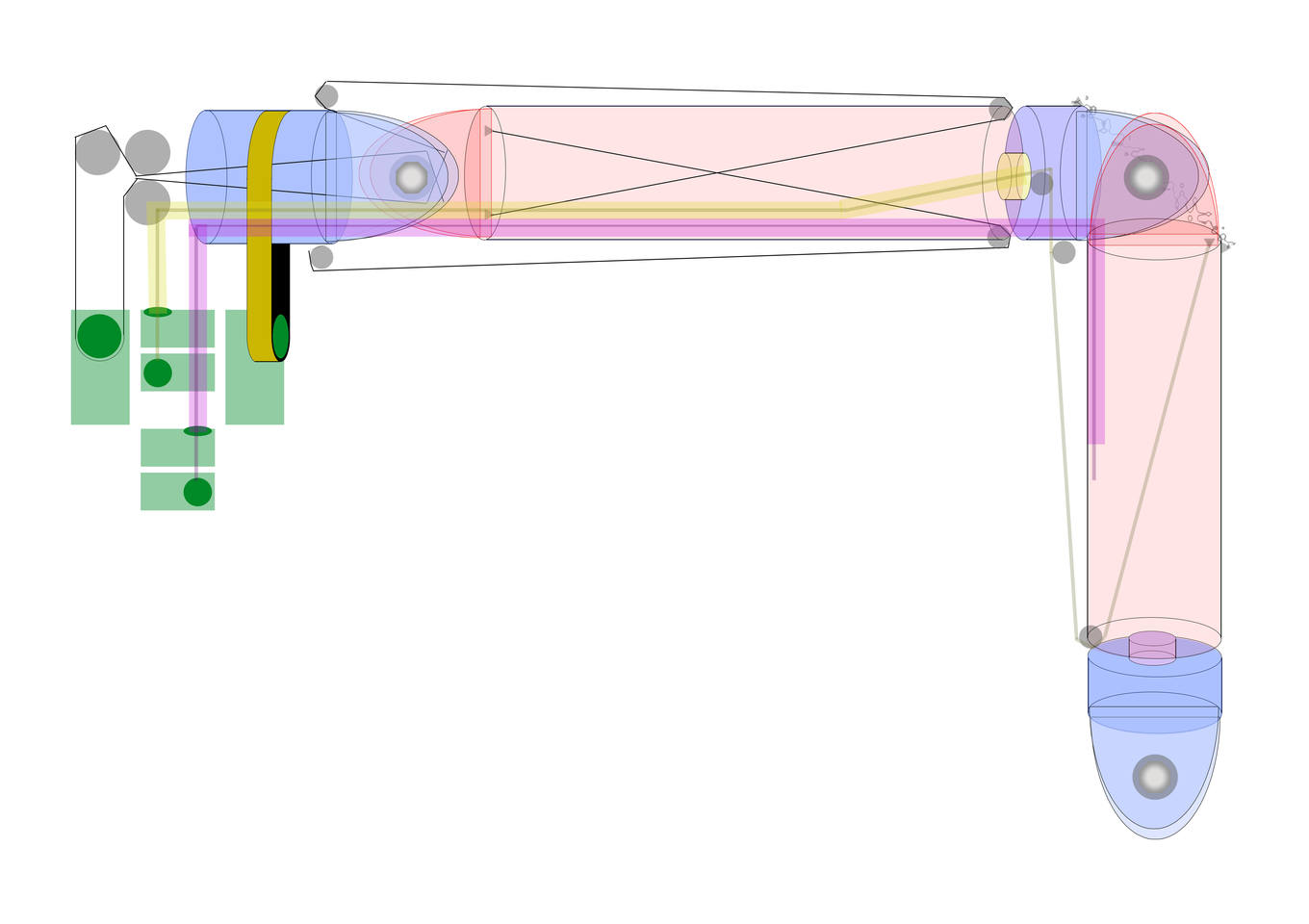
The thing that still needs to be addressed is how to make all the torque I need fit inside a female mannequin arm. The torso seems like the obvious place to store the servos, but then cables and belts get twisted and stretched as appendages pivot and rotate because servos are stupidly shaped like asteroids. My invention of the exterior flexible shaft for rotation with an interior wire for leverage has some potential (and should revolutionize robotics if I do say so myself - the rotation of this bendable hose is brilliant because the shaft bends but twists accurately across very long distances - my guess is 15 metres per millimetre of unwanted twisting - like a giant bolt that snakes around as many S bends as you like with a hollow centre for lubricated cable / wire /nitonol. This is similar to using a Dremel flexible shaft in the same way as riding a donkey is similar to driving a formula one car. The shaft’s exterior is the rotating part - at least one hundred times stronger than a dremel flexible shaft, which is flimsy, unreliable and it cannot pull and rotate in a single shaft). But I still don’t like it because it relies on counterbalancing with springs instead of a firm push-pull control. I’m trying to avoid springs (except maybe for pivot screw tensioning so that servos don’t throb when bearing weight or simply fall and smash things when power is lost).
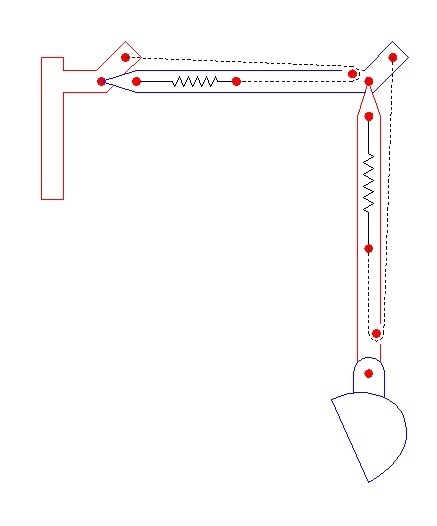
In my photoshop image in an earlier post I used the yellow and magenta lines to illustrate the use of these external metallic thread shafts as rotators attached to one servo with a pull cable down the centre of each shaft attached to a second servo. This would work a lot better if there was some kind of highly bendable rod that could be sent down the middle instead of weak cable so I could use it to both push and pull. Maybe I should investigate Nitinol Muscle Wires some more. I can’t think of anything other than string that could be thin enough to loop through the centre of the flexible shaft. String would friction itself to dust as it sawed back and forth past itself, and putting a divider inside the shaft would be very difficult. I guess I could PVC-sheath and lubricate a single direction of string to prevent friction decay. But then there might be a traffic jam. I just need fast, high torque, cylindrical servos but they are always weak, stupidly designed or massive and expensive.