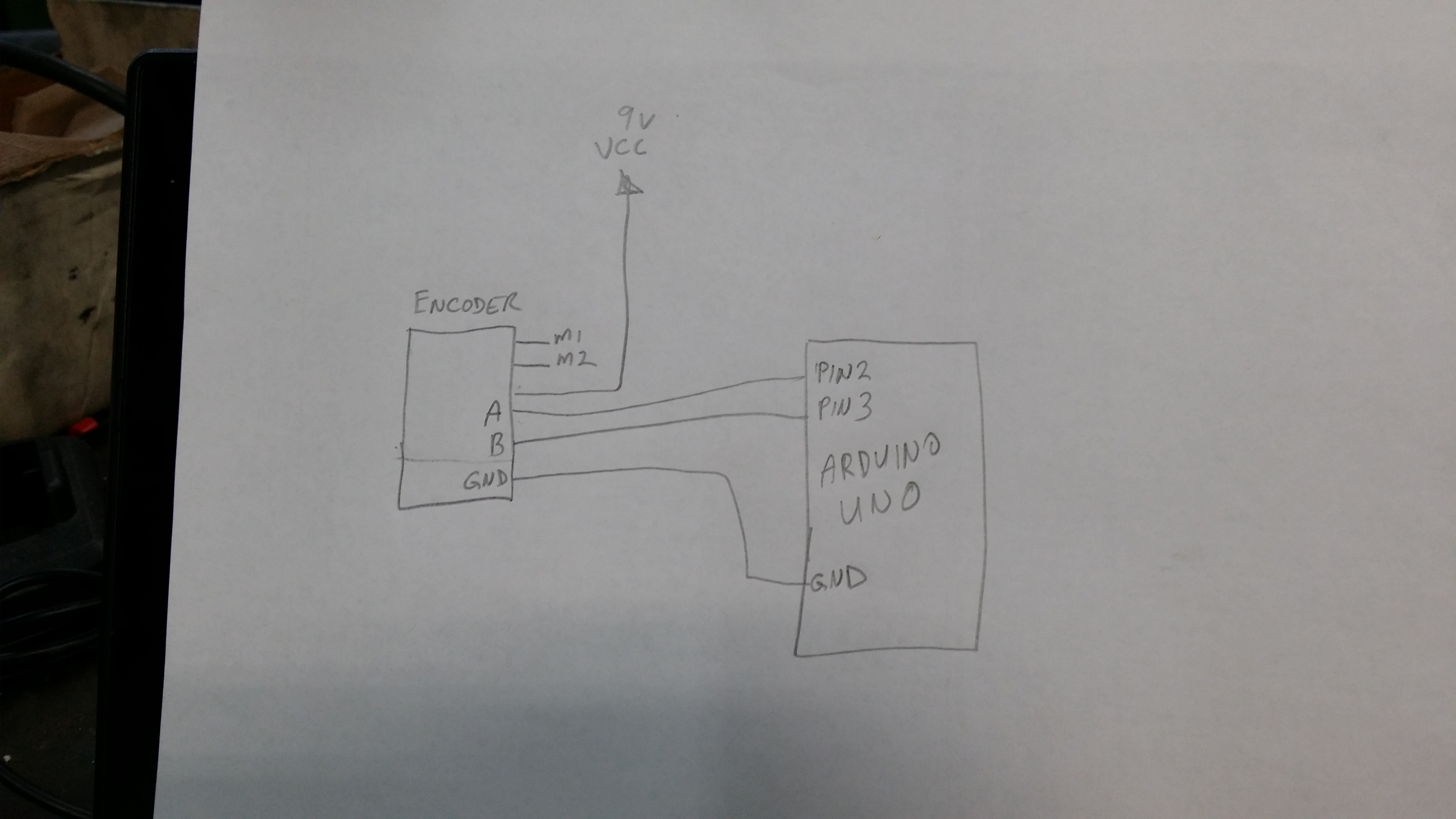
Does the standard encoder like ky-040 work different than Pololu wheel encoders?
when I hook up a volt meter to the output of a ky-040 I can get the 5v pulse when manually turning it. when I do the same to the romi encoder I get nothing or floating type readings. Also it will not work with this code.I’m trying to program an Ardunio.
// read RPM
volatile int rpmcount = 0;//see http://arduino.cc/en/Reference/Volatile
volatile int rpmcount1 = 0;
int rpm = 0;
int rpm1 = 0;
unsigned long lastmillis = 0;
unsigned long lastmillis1 = 0;
void setup(){
Serial.begin(9600);
attachInterrupt(0, rpm_fan, FALLING);//interrupt cero (0) is on pin two(2).
attachInterrupt(1, rpm_fan1, FALLING);
}
void loop(){
if (millis() - lastmillis == 500){ /*Uptade every one second, this will be equal to reading frecuency (Hz).*/
detachInterrupt(0); //Disable interrupt when calculating
rpm = rpmcount * 10; /* Convert frecuency to RPM, note: this works for one interruption per full rotation. For two interrups per full rotation use rpmcount * 30.*/
Serial.print("RPM =\t"); //print the word "RPM" and tab.
Serial.print(rpm); // print the rpm value.
Serial.print("\t RPM1=\t"); //print the word "Hz".
Serial.println(rpm1); /*print revolutions per second or Hz. And print new line or enter.*/
rpmcount = 0; // Restart the RPM counter
lastmillis = millis(); // Uptade lasmillis
attachInterrupt(0, rpm_fan, FALLING); //enable interrupt
}
if (millis() - lastmillis1 == 500){ /*Uptade every one second, this will be equal to reading frecuency (Hz).*/
detachInterrupt(1); //Disable interrupt when calculating
rpm1 = rpmcount1 * 10;
// Serial.print(C); //print the word "RPM" and tab.
// Serial.print(rpm1); // print the rpm value.
// Serial.print("\t Hz=\t"); //print the word "Hz".
// Serial.println(rpmcount1);
rpmcount1 = 0; // Restart the RPM counter
lastmillis1 = millis(); // Uptade lasmillis
attachInterrupt(1, rpm_fan1, FALLING); //enable interrupt
}
}
void rpm_fan(){ /* this code will be executed every time the interrupt 0 (pin2) gets low.*/
rpmcount++;
}
void rpm_fan1(){ /* this code will be executed every time the interrupt 0 (pin2) gets low.*/
rpmcount1++;
}
// Elimelec Lopez - April 25th 2013