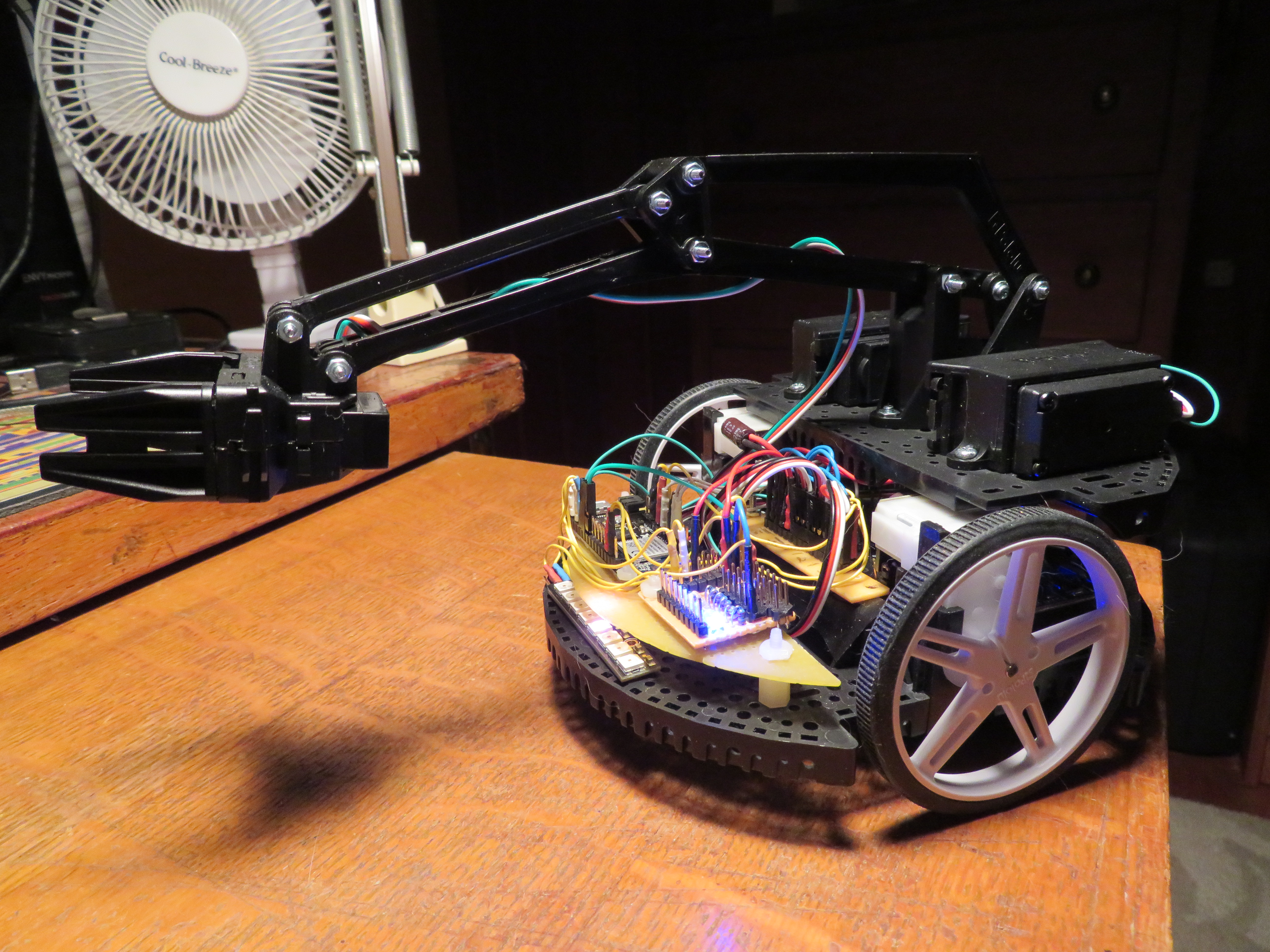
The Romi chassis with robot arm is a great opportunity to control hardware through WiFi. I chose the Adafruit Feather M0 WiFi board as the controller to do this, programmed using Arduino; the board fits nicely on the front of the chassis beneath the arm.
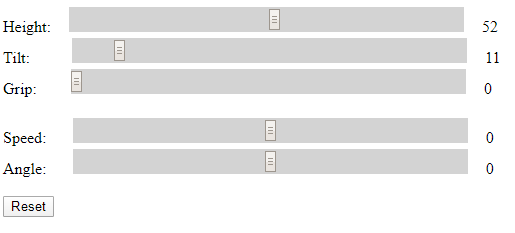
I wanted to use a web browser as the interface, so I modified the Arduino simple web server example code to generate a web page with sliders for the arm position and motor speeds. The web page sends slider values to the control code to activate the arm servos and to set timers used for PWM signals to the motors.
This makes for a robot that is easy to control and fun to drive and pick up small objects. The use of the web server and web page originating on the robot is an interesting approach to robot control.
The images below show the robot and the web page; the Arduino code is at
2 Likes
Hello.
That is pretty cool; thank you for posting about your Romi project! We are always excited to see what people make with our products.
Just out of curiosity, the readme in your github repository makes it sound like you might be using our motor driver and power distribution board to control the plastic gearmotors; is that correct? It also seems like you have our encoders installed, but I did not see anything in your code utilizing them. Is that something you plan to use in the future?
- Patrick
Patrick –
Thanks for your interest. Yes, I’m using the motor driver and power board – it makes using the chassis pretty easy.
I do have the Pololu shaft encoders (though I wasn’t smart enough to set up their power to use 3.3v from the computer board). Since the system at this point isn’t autonomous, I’m not using the encoders now. I may add a separate motor handler board to generate odometry for a more complex system (likely a SAMD51-based board with floating point support and faster clock to handle the encoder interrupts).
Right now it’s just fun to drive around and try to pick things up.
Jim
2 Likes