
Hi!
I want to localize a quadrocopter in relation to the transmitter in 3 dimensions. The idea is that if a transmitter sends a signal to my quadrocopter, it will change its position to be on the same X-Y plane as the transmitter and to be a specified distance from the transmitter. This image should explain my point:
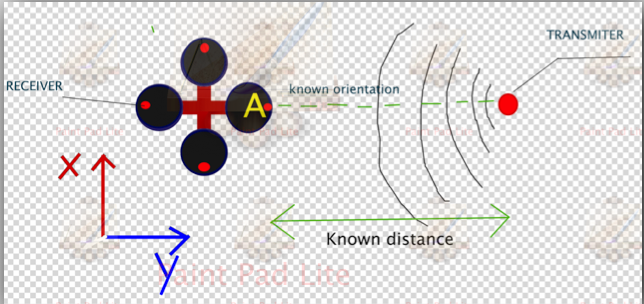
Please note that I also want the quadcopter to have known orientation (point A in Figure). The localization range should be approx. 0.5 – 3m. Accuracy approx. 15cm.
My first idea is to use radio communication and delay of arrival algorithm to do it. I put 4 (# more or less) receivers on my quadcopter and they receive signal from the transceiver with different delay such that I can estimate the position. To measure a distance quadcopter can send back a signal to the transmitter while counting time.
My questions:
- Is there better (less complicated) method to do it, e.g. all-in-one module :)?
- how bad can be a RF signal distortion/reflection and how it can influence the localization precision?
- Is it possible to install many receivers on one electronic board and be able to notice time delay difference?
- If yes, what modules do you recommend?
P.S. this is my first post here, please forgive me any rules violation ![]()