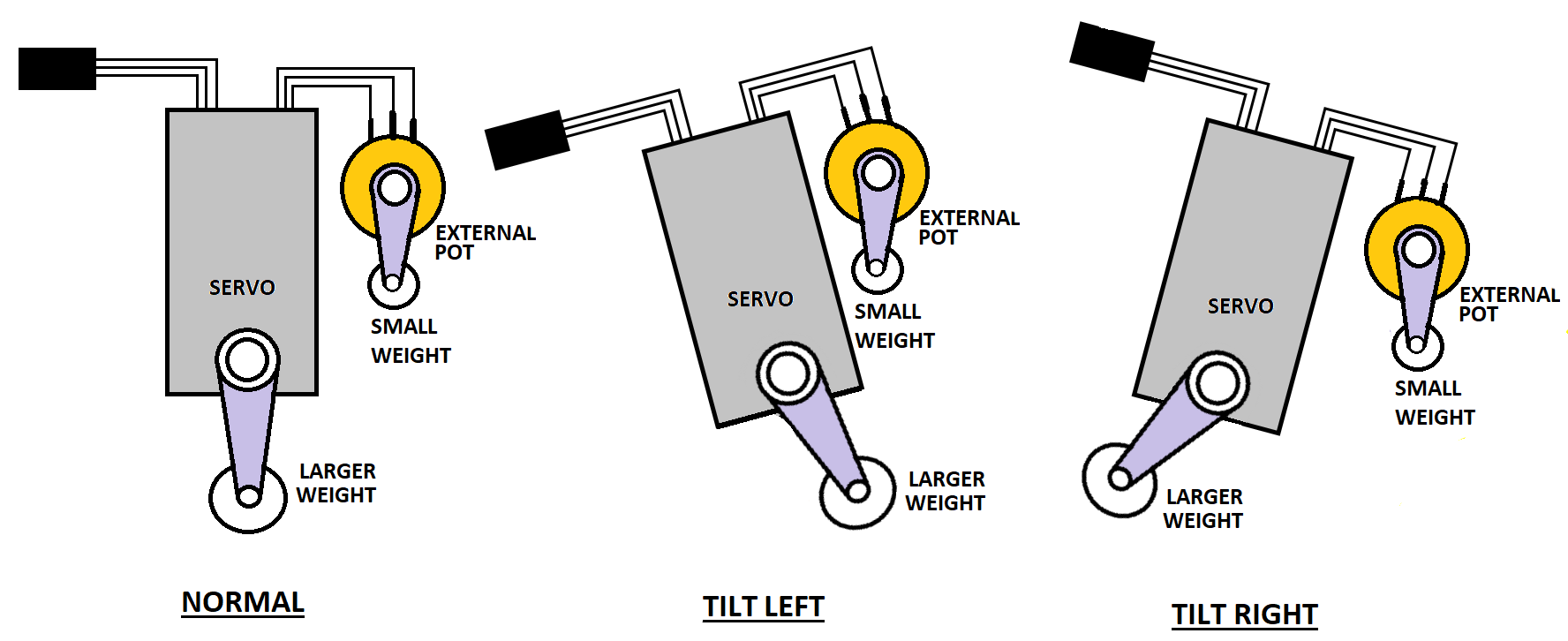
I would like to replace the servo’s internal pot with an external smooth low turn resistance pot that has a small, weighted arm connected to the shaft. Movement of the pot’s arm weight should counter act the servo’s arm weight. The maximum tilt would probably be about 45 degrees off center. I believe the resistance of the pot over that 90-degree range would need to be the same as the pot in the servo fo0 the same range.
The purpose is to have the pot’s shaft turn signaling the servo’s output run in the opposite direction with a larger weight as a counterbalance forcing the boat back to neutral until the pot and the servo’s weight are vertical using gravity.
A small gyro device I have does not allow me to do this. It only pulses.
It is not clear to me if you’re asking about one of our products, and you post does not seem to have any direct questions, but it sounds like an interesting idea. I have not made a system like that and don’t have any specific recommendations for parts, but here are some general considerations:
If you are essentially limited to tuning the system by adjusting the weights and lengths of the lever arms (i.e. you do not have access to reprogramming the servo), it might be difficult to get the behavior to work out the way you want. You might consider using a separate microcontroller, such as an Arduino or one of our Arduino-compatible A-Star controllers, to read the gravity-driven pot and drive an (unmodified) servo accordingly, that way you could tune your own PID algorithm.
I’m not sure what you tried with your gyro, but a more elegant solution would probably be to have a programmable controller process the readings from an inertial measurement unit (gyro + accelerometer) for feedback about the angle instead of your gravity-driven potentiometer idea.
Thanks Brandon for responding. I’m trying not to get to something complicated like the Arduino (my programming days are long past).
I have purchased items from you guys back a few years ago, buck converters, servo switches, etc.
I am looking for something simple, like plug and Play, to control a servo using gravity. Think of a model sailboat, rolling side to side. I want to stabilize that by having a weight shift inside the hull, likely off of a servo arm.
I purchased several of those cheap electronic gyros. They only seem to detect movement a little bit then center back. They don’t hold in the leaning position to help upright the boat.
I just found something I would probably work better. And that would be a servo tester. I think by connecting a weight on the tester’s knob so that when they tester is rotated the knob remain in the same position because of gravity.
Lew
Unfortunately, we do not carry or make something like that as an off-the-shelf product. I would be interested to hear how using a servo tester works for you though!
As far as using gyros, a gyro measures angular velocity, which is the rate of rotation. So, generally when the object stops rotating on that axis, the measurement will be 0. Using an accelerometer in combination with a gyro would give you a much more complete measurement but will require some processing with something like an Arduino.