Hey all, thought I’d share where I’m at so far with my RPi telepresence rover featuring a pile of Pololu parts ![]() Details here
Details here
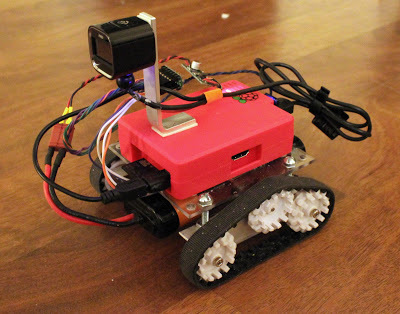
It’s wifi based, uses webiopi to directly control Pololu DRV8835 motor drivers running Pololu 30T track kit with extra idler wheel.
The RPi is in a Cyntech case on a lexan base, everything powered by a 6C NiMH through a Pololu 5V 3A step-down regulator.
The camera is a Microsoft LifeCam HD-6000 with capture by mjpg-streamer.
The control panel uses JQuery to call webiopi api and display the streaming image.