
I recently received MinIMU-9(DLH carrier) and have been testing it.
I have no trouble reading data from it and it’s working fine with the given MinIMU-9-Arduino-AHRS code.
I edited the MinIMU-9-Arduino-AHRS code from this part
// Calculations...
Matrix_update();
Normalize();
Drift_correction();
Euler_angles();
// ***
printdata();to this
// Calculations...
Matrix_update();
Normalize();
Drift_correction();
Euler_angles();
// ***
Serial.print(pitch,10);
Serial.print(" ");
Serial.print(roll,10);
Serial.print(" ");
Serial.print(yaw,10);
Serial.print(" ");
Serial.print(gyro_y);
Serial.print(" ");
Serial.print(gyro_x);
Serial.print(" ");
Serial.print(gyro_z);
Serial.println("");
// printdata();Then I plotted the data into matlab and I noticed, that I’m getting these strange peaks from all gyro axes. Mostly from Z-axis. They are all around -250 or 250.
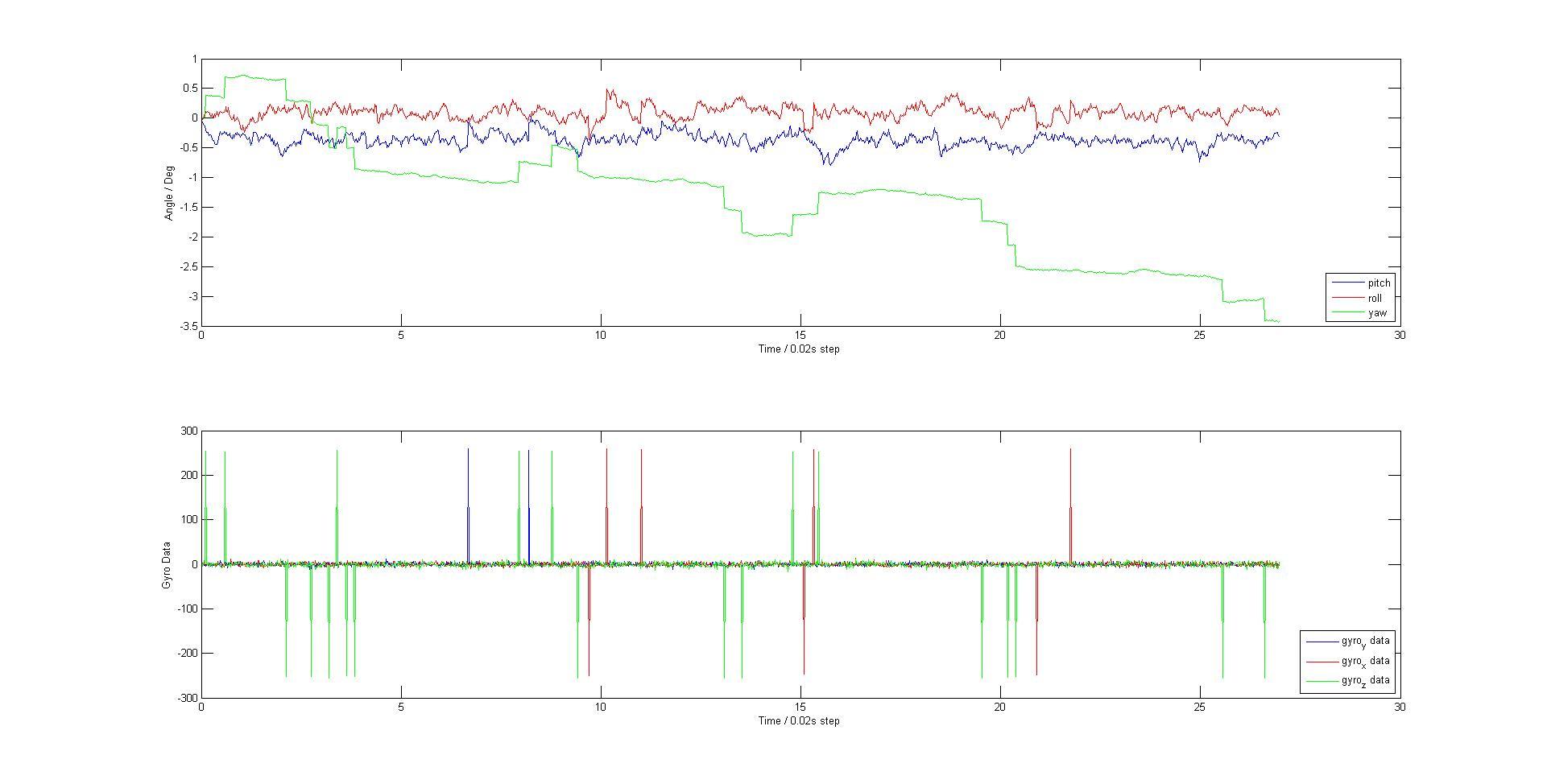
Could this be some sort of communication error and the data bytes get corrupted? How could I fix it?