Hi,
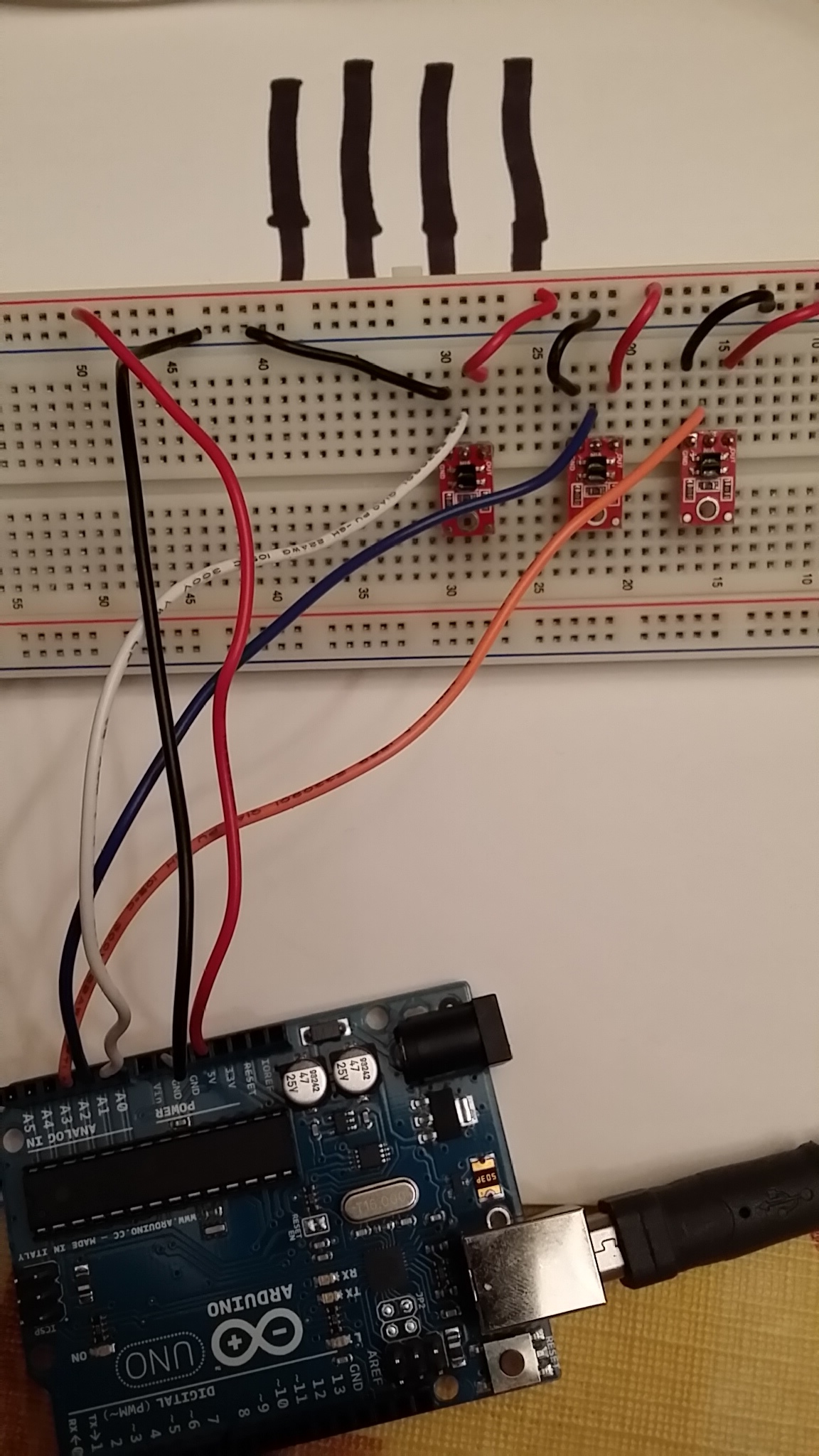
I would like to know if my 3 sensors are broken. I’m using the QTRA example code and have my 3 sensors on a breadboard. I’ve tried various ways to get a min reading of zero but it stays high for everything. In my picture I flip the breadboard over and jiggle the sensors over the lines during calibration. I cannot get ‘calibration min.’ on any of the three sensors to zero (see output list).
Pic, code and output attached. I appreciate your help.
#include <QTRSensors.h>
// This example is designed for use with six QTR-1A sensors or the first six sensors of a
// QTR-8A module. These reflectance sensors should be connected to analog inputs 0 to 5.
// The QTR-8A's emitter control pin (LEDON) can optionally be connected to digital pin 2,
// or you can leave it disconnected and change the EMITTER_PIN #define below from 2 to
// QTR_NO_EMITTER_PIN.
// The setup phase of this example calibrates the sensor for ten seconds and turns on
// the LED built in to the Arduino on pin 13 while calibration is going on.
// During this phase, you should expose each reflectance sensor to the lightest and
// darkest readings they will encounter.
// For example, if you are making a line follower, you should slide the sensors across the
// line during the calibration phase so that each sensor can get a reading of how dark the
// line is and how light the ground is. Improper calibration will result in poor readings.
// If you want to skip the calibration phase, you can get the raw sensor readings
// (analog voltage readings from 0 to 1023) by calling qtra.read(sensorValues) instead of
// qtra.readLine(sensorValues).
// The main loop of the example reads the calibrated sensor values and uses them to
// estimate the position of a line. You can test this by taping a piece of 3/4" black
// electrical tape to a piece of white paper and sliding the sensor across it. It
// prints the sensor values to the serial monitor as numbers from 0 (maximum reflectance)
// to 1000 (minimum reflectance) followed by the estimated location of the line as a number
// from 0 to 5000. 1000 means the line is directly under sensor 1, 2000 means directly
// under sensor 2, etc. 0 means the line is directly under sensor 0 or was last seen by
// sensor 0 before being lost. 5000 means the line is directly under sensor 5 or was
// last seen by sensor 5 before being lost.
#define NUM_SENSORS 3 // number of sensors used
#define NUM_SAMPLES_PER_SENSOR 4 // average 4 analog samples per sensor reading
#define EMITTER_PIN QTR_NO_EMITTER_PIN // emitter is controlled by digital pin 2
// sensors 0 through 5 are connected to analog inputs 0 through 5, respectively
QTRSensorsAnalog qtra((unsigned char[]) {0, 1, 2, 3, 4, 5},
NUM_SENSORS, NUM_SAMPLES_PER_SENSOR, EMITTER_PIN);
unsigned int sensorValues[NUM_SENSORS];
void setup()
{
delay(500);
pinMode(13, OUTPUT);
digitalWrite(13, HIGH); // turn on Arduino's LED to indicate we are in calibration mode
// print the calibration minimum values measured when emitters were on
Serial.begin(9600);
Serial.println("Starting calibration in 5 seconds");
delay(1000); // wait for window to be opened
Serial.println(", 4");
delay(1000); // wait for window to be opened
Serial.println(", 3");
delay(1000); // wait for window to be opened
Serial.println(", 2");
delay(1000); // wait for window to be opened
Serial.println(", 1");
delay(1000); // wait for window to be opened
Serial.println(", 0");
for (int i = 0; i < 400; i++) // make the calibration take about 10 seconds
{
qtra.calibrate(); // reads all sensors 10 times at 2.5 ms per six sensors (i.e. ~25 ms per call)
}
digitalWrite(13, LOW); // turn off Arduino's LED to indicate we are through with calibration
//Print calibrations
for (int i = 0; i < NUM_SENSORS; i++)
{
Serial.print("Calibrated min. ");
Serial.print(i);
Serial.print(" = ");
Serial.print(qtra.calibratedMinimumOn[i]);
Serial.print(' ');
}
Serial.println();
// print the calibration maximum values measured when emitters were on
for (int i = 0; i < NUM_SENSORS; i++)
{
Serial.print("Calibrated max. ");
Serial.print(i);
Serial.print(" = ");
Serial.print(qtra.calibratedMaximumOn[i]);
Serial.print(' ');
}
Serial.println();
Serial.println();
delay(1000);
}
void loop()
{
// read calibrated sensor values and obtain a measure of the line position from 0 to 5000
// To get raw sensor values, call:
// qtra.read(sensorValues); instead of unsigned int position = qtra.readLine(sensorValues);
unsigned int position = qtra.readLine(sensorValues);
// print the sensor values as numbers from 0 to 1000, where 0 means maximum reflectance and
// 1000 means minimum reflectance, followed by the line position
for (unsigned char i = 0; i < NUM_SENSORS; i++)
{
Serial.print("Sensor ");
Serial.print(i);
Serial.print(" = ");
Serial.print(sensorValues[i]);
Serial.print('\t');
}
Serial.println(); // uncomment this line if you are using raw values
//Serial.println(position); // comment this line out if you are using raw values
delay(500);
}
Starting calibration in 5 seconds
, 4
, 3
, 2
, 1
, 0
Calibrated min. 0 = 195 Calibrated min. 1 = 195 Calibrated min. 2 = 195
Calibrated max. 0 = 196 Calibrated max. 1 = 196 Calibrated max. 2 = 196
Sensor 0 = 0 Sensor 1 = 0 Sensor 2 = 0
Sensor 0 = 0 Sensor 1 = 0 Sensor 2 = 0
Sensor 0 = 1000 Sensor 1 = 1000 Sensor 2 = 0