Hi
We are working on Pololu based robotic dog project and while we try to control DC servo motor by pololu servo controller, we are seeing that servo motor position is reset when we disconnect and connect.
How do we make sure there is no servo movement and persistent with its old position?
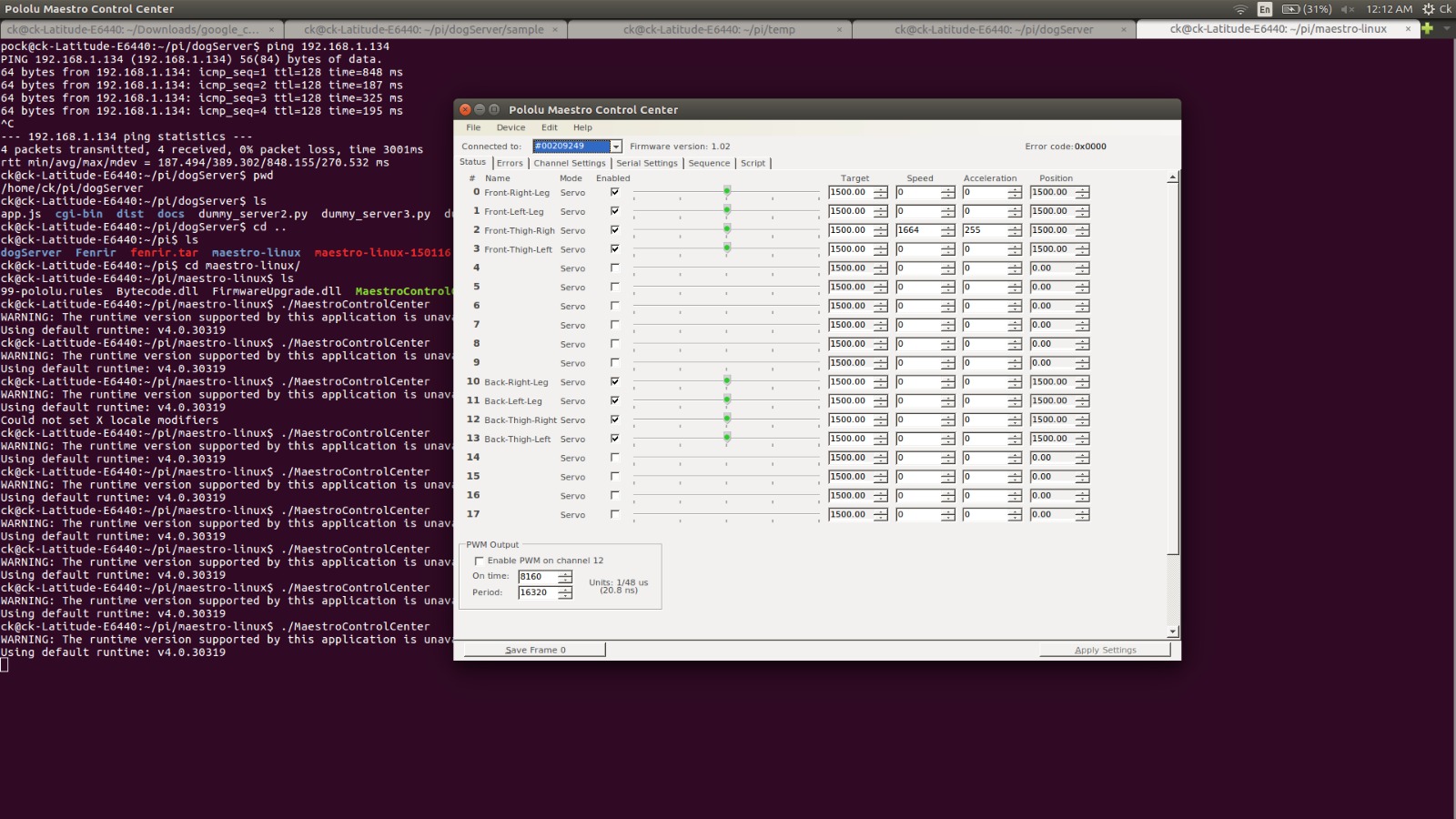
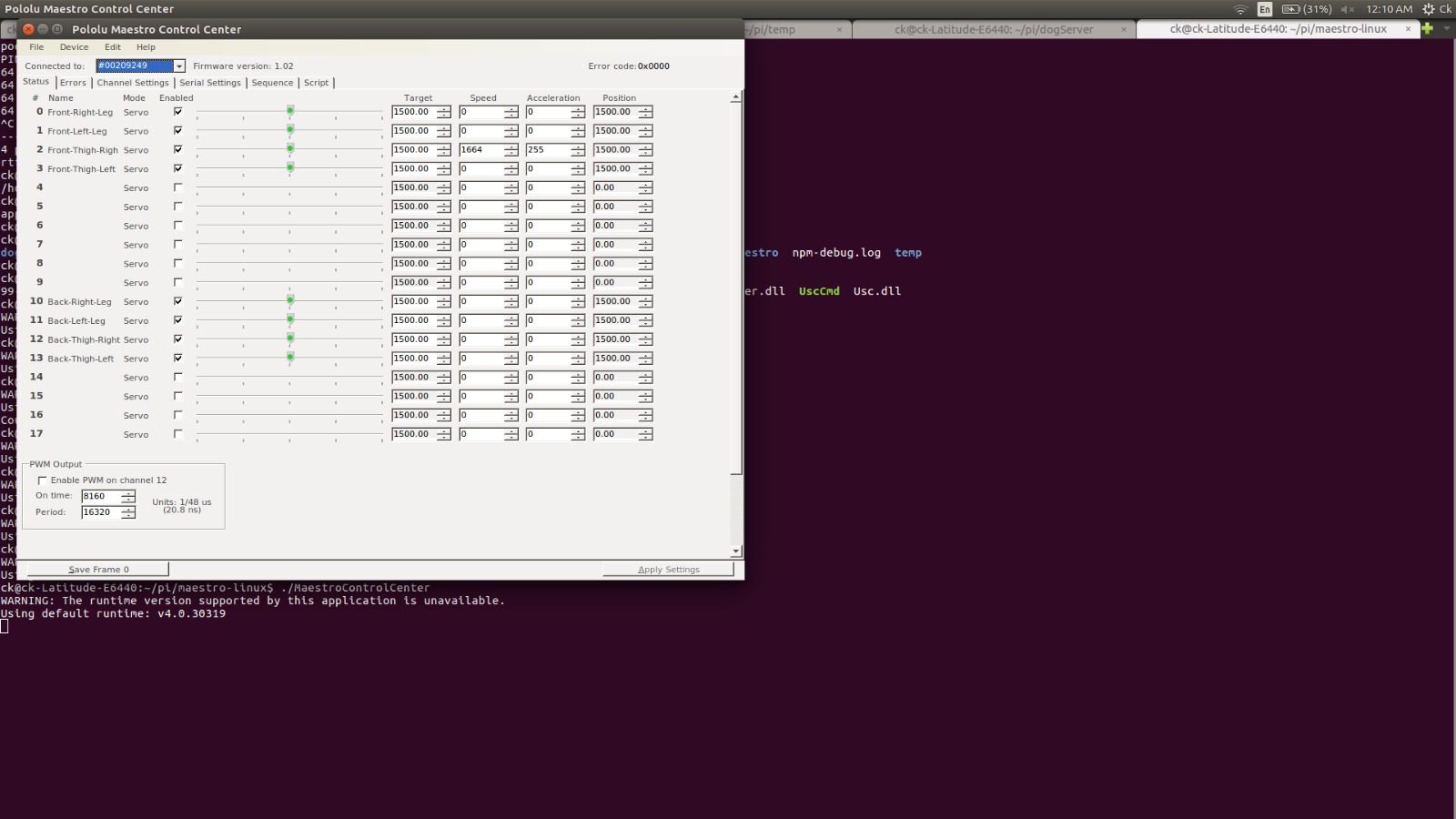
Target is 1500 now
Target is now moved different position
After disconnect pololu and reconnect and motor is reset back to original position
Hello.
Hobby servos use their feedback internally and do not make it externally available, so there is no way for a servo controller to know where a servo is. When the Maestro is sending servo signals, it assumes the servos are at those positions, although it has no way of confirming whether a servo actually made it to its target. When the Maestro gets power-cycled it has no way of knowing where the servos is.
If you want no movement on startup, you could use a “home” position for each servo and have a shutdown sequence that moves the servos to their home position before shutting off power. To start the servos in those same positions on power up, you can configure the “On startup or error” drop-down option in the “Channel Settings” tab of the Maestro Control Center for each servo to the “Go to” setting and use the same “home” position you sent them to in the power-down sequence.
Brandon