Hello,
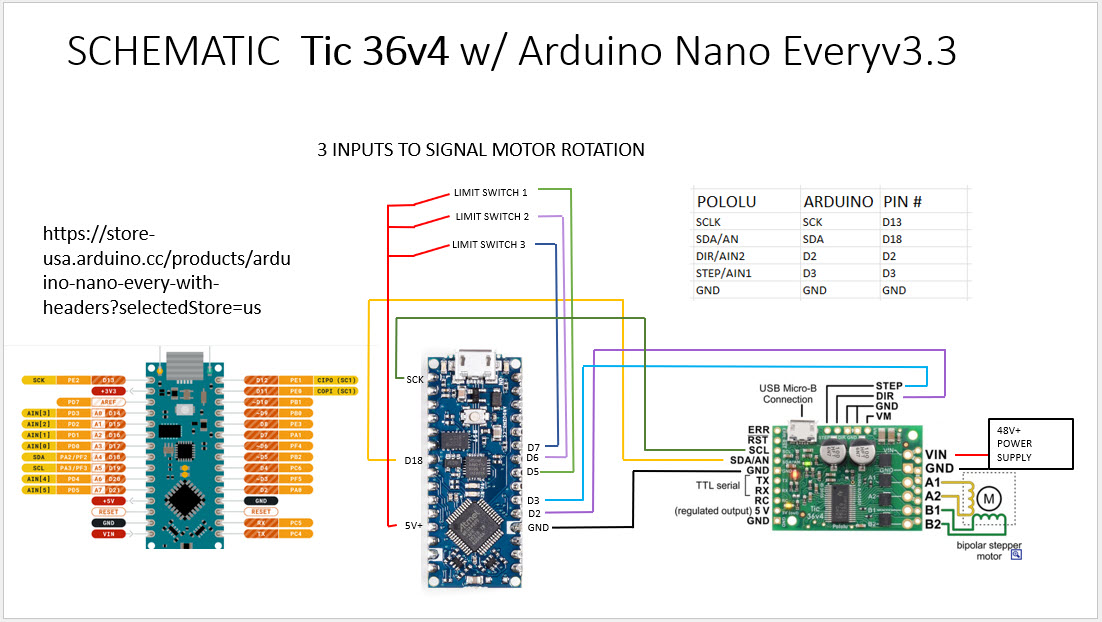
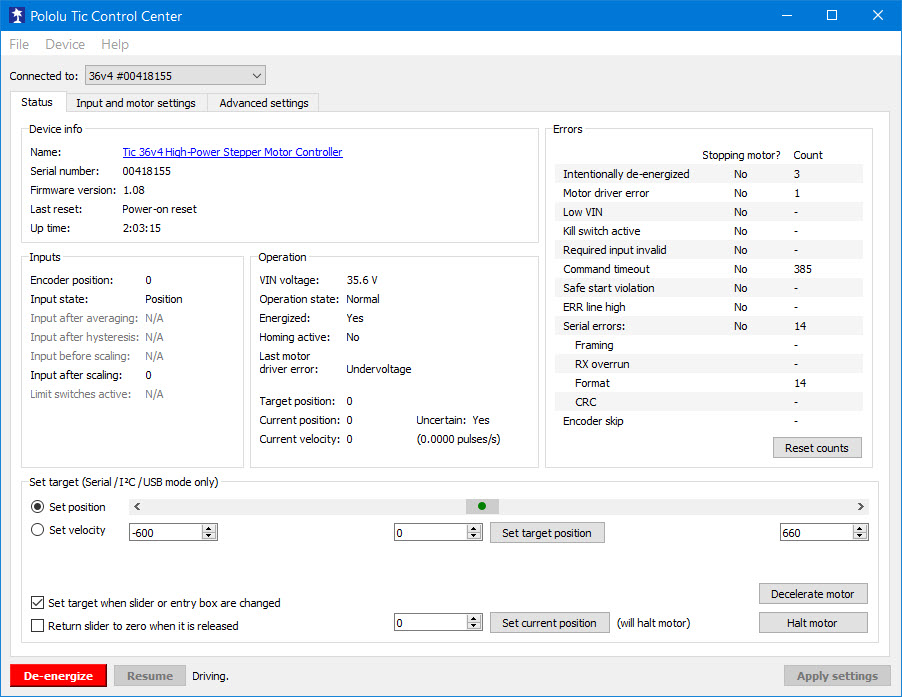
Any help would be greatly appreciated. I’m having trouble getting my stepper motor setup working. When stepper is connected it start to make a terrible sound so I disconnected it as fast as possible. After disconnecting the motor and measuring for voltage across A1-A2 (not sure if this is possible/correct way to measure voltage out to motor??) reading shows constant 48v. Dead constant voltage, no fluctuation in the reading at all, Measuring across B1-B2 shows a few mV.
I started with the basic stepper motor package from Pololu on Github. In the Arduino sketch I did increase the StepPeriodUs value (to as much as 1000000) to try and slow it down to give the meter a chance register the voltage change, but to no avail. I also added Serial.begin( 9600 ); and some Serial.println( “ROTATE 1” ); code to try and get a visual thru the serial monitor of how fast the steps were being executed. Also learned nothing there.
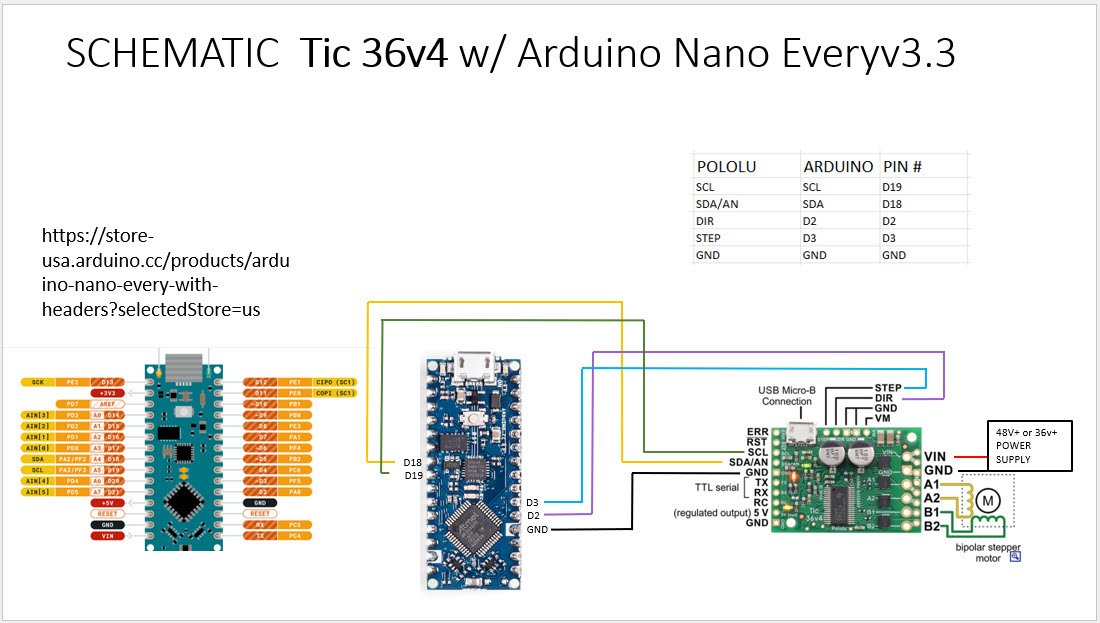
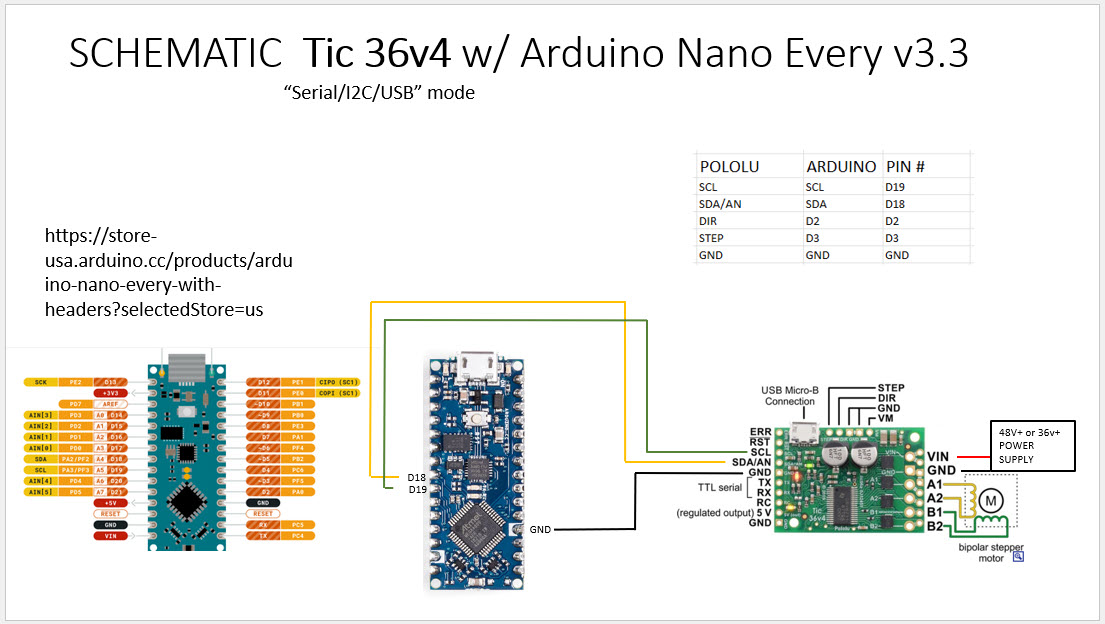
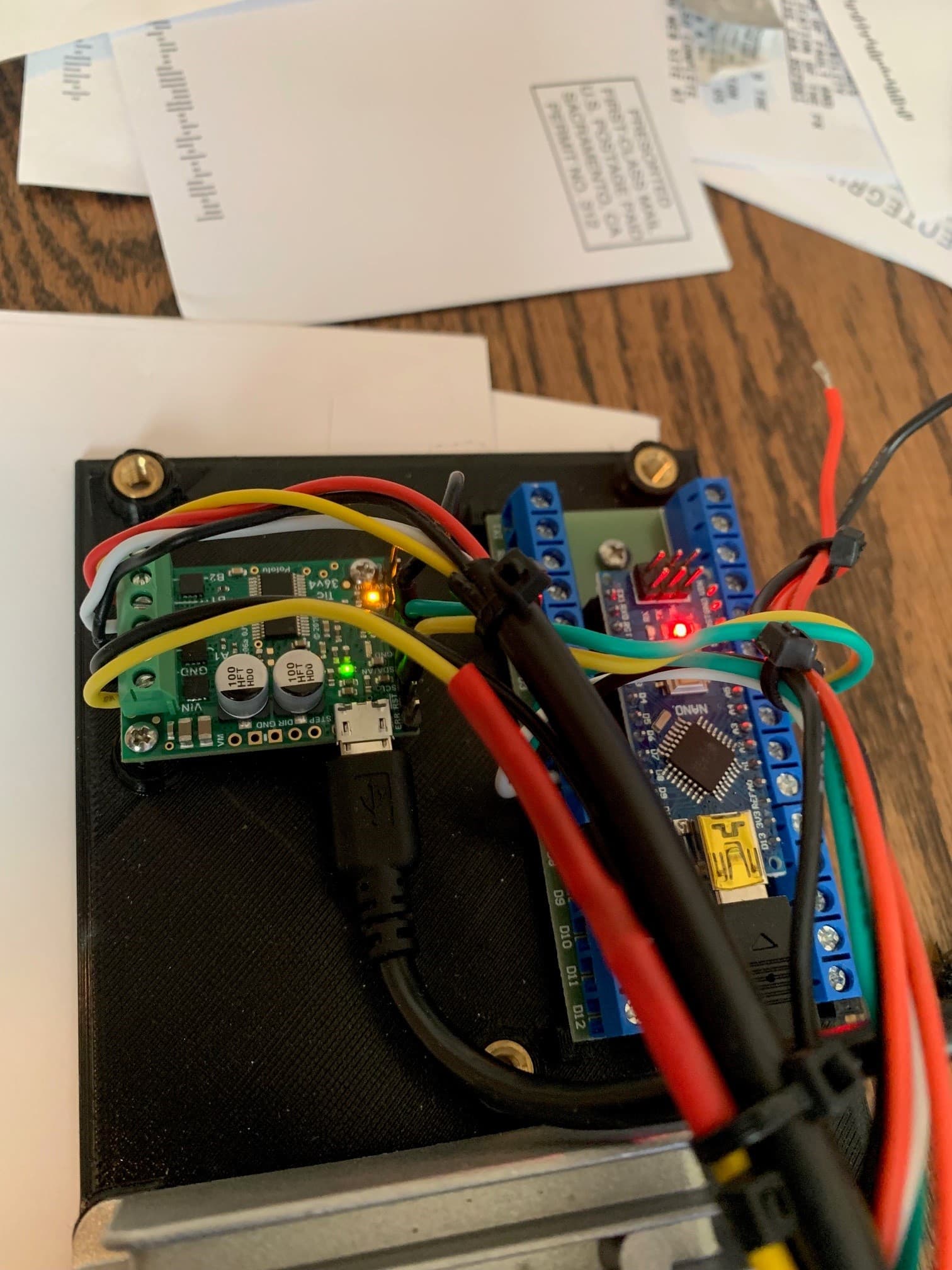
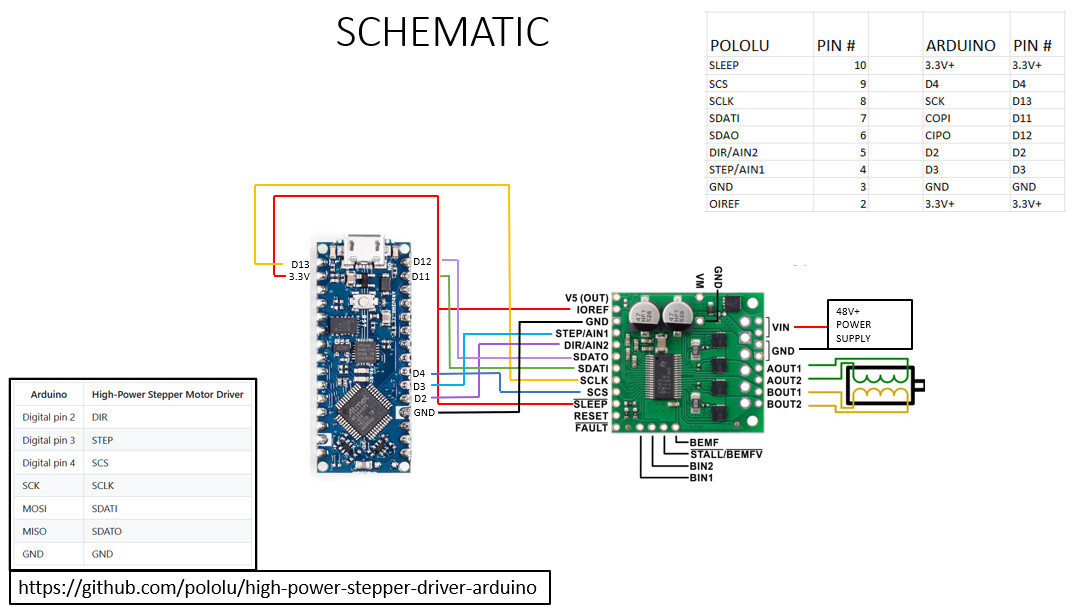
Please see Schematic and Arduino Sketch below
Again, thanks for any advise, newbie appreciates it.
// This example shows basic use of a Pololu High Power Stepper Motor Driver.
//
// It shows how to initialize the driver, configure various settings, and enable
// the driver. It shows how to step the motor and switch directions using the
// driver's SPI interface through the library's step() and setDirection() member
// functions.
//
// Since SPI is used to trigger steps and set the direction, connecting the
// driver's STEP and DIR pins is optional for this example. However, note that
// using SPI control adds some overhead compared to using the STEP and DIR pins.
// In addition, since the library caches SPI register values, SPI control is
// more likely to re-enable the driver with the wrong settings (e.g. current
// limit) after a power interruption, although using the verifySettings() and
// applySettings() functions appropriately can help prevent this.
//
// Before using this example, be sure to change the setCurrentMilliamps36v4 line
// to have an appropriate current limit for your system. Also, see this
// library's documentation for information about how to connect the driver:
// http://pololu.github.io/high-power-stepper-driver
#include <SPI.h>
#include <HighPowerStepperDriver.h>
const uint8_t CSPin = 4;
const uint8_t DirPin = 2;
const uint8_t StepPin = 3; //ADDED
// This period is the length of the delay between steps, which controls the
// stepper motor's speed. You can increase the delay to make the stepper motor
// go slower. If you decrease the delay, the stepper motor will go faster, but
// there is a limit to how fast it can go before it starts missing steps.
const uint16_t StepPeriodUs = 10000; //CHANGED
HighPowerStepperDriver sd;
void setup()
{
Serial.begin( 9600 ); //ADDED
SPI.begin();
sd.setChipSelectPin(CSPin);
// Give the driver some time to power up.
delay(10); //CHANGED
// Reset the driver to its default settings and clear latched status
// conditions.
sd.resetSettings();
sd.clearStatus();
// Select auto mixed decay. TI's DRV8711 documentation recommends this mode
// for most applications, and we find that it usually works well.
sd.setDecayMode(HPSDDecayMode::AutoMixed);
// Set the current limit. You should change the number here to an appropriate
// value for your particular system.
sd.setCurrentMilliamps36v4(500); //CHANGED
// Set the number of microsteps that correspond to one full step.
sd.setStepMode(HPSDStepMode::MicroStep32);
// Enable the motor outputs.
sd.enableDriver();
}
void loop()
{
// Step in the default direction 1000 times.
sd.setDirection(0);
for(unsigned int x = 0; x < 10; x++)
{
sd.step();
delayMicroseconds(StepPeriodUs);
Serial.println( "ROTATE 1" ); //ADDED
}
// Wait for 300 ms.
delay(2000); //CHANGED
Serial.println( "DELAY 1" ); //ADDED
// Step in the other direction 1000 times.
sd.setDirection(1);
for(unsigned int x = 0; x < 10; x++)
{
sd.step();
delayMicroseconds(StepPeriodUs);
Serial.println( "ROTATE 2" ); //ADDED
}
// Wait for 300 ms.
delay(2000); //CHANGED
Serial.println( "DELAY 2" ); //ADDED
}