
Dears All
If I have the following parameters of dynamic model for a mobile robot had the state-space equations below
Moment of inertia around the C.G. of robot Iv = 10 Kg.m^2
Mass of the robot M =200 Kg
Distance between left and right wheel and the c.g. of robot l = 0.3 m
Moment of inertia of wheel Iw = 0.005 Kg.m^2
Viscous friction factor c = 0.05 Kg/s
Radius of wheel r = 0.1 m
Driving gain factor k = 5
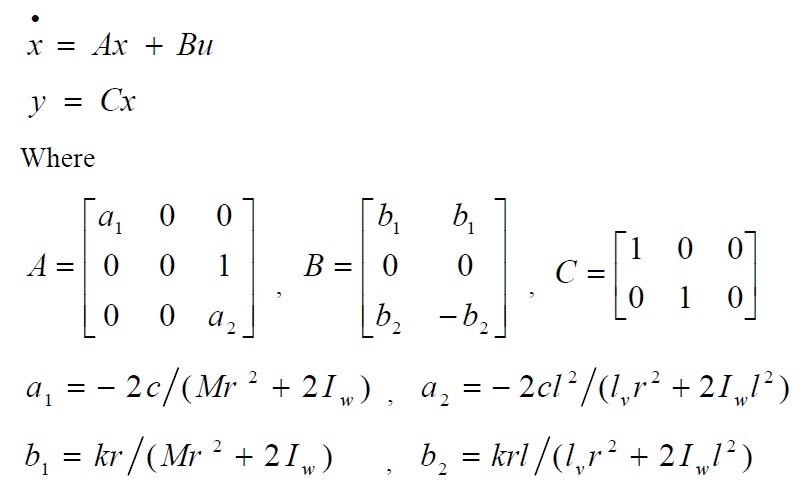
the state variable for the robot as x = [v θ θ’ ]^T The manipulated variable as [Ur Ul ]^T , and the output variable as y = [v θ ]^T
θ : Azimuth of the robot
v : Velocity of the robot
Ul : torque for the left wheel
Ur : torque for the right wheel
How could I calculate or infer the Viscous friction factor c & Driving gain factor k values for another mobile robot with the following parameters for the same dynamic model above
Iv = 1.5 Kg.m^2
M = 2 Kg
l = 0.2 m
Iw = 0.001 Kg.m^2
c = ?
r = 0.02 m
k= ?
thanks