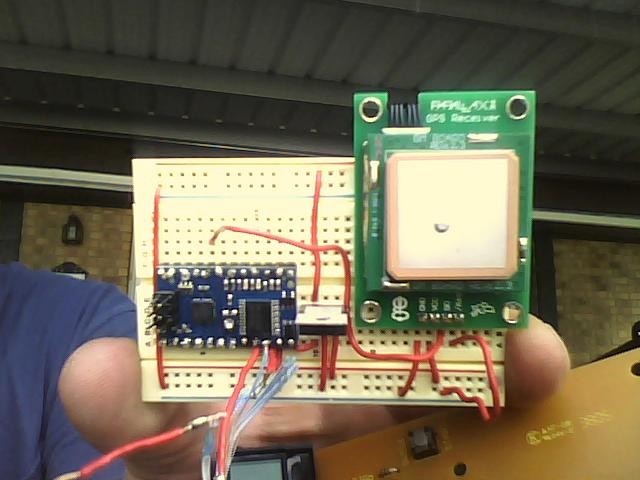
I have finished the basic ‘raw mode’ Parallax GPS reader for the Baby Orangutan. It parses the $GPRMC data string for latitude, longitude, UTC date and time, etc. Here it is…
/*
A 'raw mode' data reader for the Parallax GPS receiver module #28146 (based on Polstar PMB-248)
for use with the Baby Orangutan robot controller or with slight modifications, other Pololu orangutans
(data stream is captured and parsed) scottfromscott@bellsouth.net
*/
#define F_CPU 20000000UL // Baby Orangutan frequency (20MHz)
#include <math.h>
#include <avr/io.h>
#include <util/delay.h> // uses F_CPU to achieve us and ms delays
#include <pololu/orangutan.h>
#include <stdlib.h>
#include <string.h>
#include <ctype.h>
char gps[650]; // array to store $GPRMS string
//format of Parallax GPS GPMRC string...
//$GPMRC,HHMMSS,A,DDMM.MMMM,S,DDDMM.MMMM,S,KKK.K,HHH.H,DDMMYY,,,A*64<13>
//0123456789012345678901234567890123456789012345678901234567890123456
// 1 2 3 4 5 6
// $GPRMS string locations for following data items...
int utc_hours=7, utc_minutes=9, utc_seconds=11, latitude=16, \
latitude_hemisphere=26, longitude=28, longitude_hemisphere=39, speed=41, \
heading=47, utc_day=53, utc_month=55, utc_year=57;
void delayms(unsigned int time_ms)
{for (unsigned int i = 0; i < time_ms; i++) _delay_ms(1);
}
//the following 4 debug functions flash an external LED I attached to #2 pwm motor port
//because the built-in RED LED is not available when the UART is being used
void debug_port(unsigned char pwm)
{ OCR2A = 0;
OCR2B = pwm;
}
void debug_init()
{ TCCR2A = 0xF3;
TCCR2B = 0x02;
OCR2A = OCR2B = 0;
DDRD |= (1 << PORTD3) | (1 << PORTD5) | (1 << PORTD6);
DDRB |= (1 << PORTB3);
}
void debug_pulse_digit(int digit)
{ // pulse external led 1..10 times depending on value of digit
// 1 -> 1 pulse; 2 -> 2 pulses; ... 9 -> 9 pulses; BUT 0 -> 10 pulses
int counter, freq=75, delay=250;
if(digit==0) digit = 10; // special case for 0
for(counter=1;counter<=digit;counter++)
{ debug_port(freq);
delayms(delay);
debug_port(0);
delayms(delay);
}
delayms(1000);
}
void debug(float v)
{ // pulse 6 digits (hto.hto[-]) if negative, single pulse follows 6 pulse sequences
// example output: -23.5 -> 023.500- -> 10 pulses, 2 pulses, 3 pulses, 5 pulses, 10 pulses, 10 pulses, 1 pulse
int o,t,h,d,n=0;
if(v<0){v=-v;n=1;}
h=(int)(v/100);t=(int)((v-h*100)/10);o=(int)(v-t*10-h*100);
debug_pulse_digit(h);debug_pulse_digit(t);debug_pulse_digit(o);
d=(int)((v-h*100-t*10-o)*1000); // .hto -> hto.
h=(int)(d/100);t=(int)((d-h*100)/10);o=(int)(d-t*10-h*100);
debug_pulse_digit(h);debug_pulse_digit(t);debug_pulse_digit(o);
if(n) debug_pulse_digit(1); // seventh pulse indicates negative
delayms(1000); //pause between numbers
}
float get_gps(int request)
{ float r;
if(request==utc_hours)
r=(gps[utc_hours+0]-48)*10+(gps[utc_hours+1]-48);
else if(request==utc_minutes)
r=(gps[utc_minutes+0]-48)*10+(gps[utc_minutes+1]-48);
else if(request==utc_seconds)
r=(gps[utc_seconds+0]-48)*10+(gps[utc_seconds+1]-48);
else if(request==latitude)
{ //accuracy: DDMM -- .MMMM ignored; minutes converted to decimal degrees
r=(gps[latitude+0]-48)*10+(gps[latitude+1]-48)+(float)((gps[latitude+2]-48)*10+(gps[latitude+3]-48))/60;
if(gps[latitude_hemisphere]=='S') r=-r; // apply sign
}
else if(request==longitude)
{ //accuracy: DDDMM -- .MMMM ignored; minutes converted to decimal degrees
r=(gps[longitude+0]-48)*100+(gps[longitude+1]-48)*10+(gps[longitude+2]-48) \
+(float)((gps[longitude+3]-48)* 10+(gps[longitude+4]-48))/60;
if(gps[longitude_hemisphere]=='W') r=-r; // apply sign
}
else if(request==speed)
//fyi: mph = 6076/5280 * knots ~= 1.15*knots; speed below is in knots
r=(gps[speed+0]-48)*100+(gps[speed+1]-48)*10+(gps[speed+2]-48)+(float)(gps[speed+3]-48)*0.1;
else if(request==heading)
r=(gps[heading+0]-48)*100+(gps[heading+1]-48)*10+(gps[heading+2]-48)+(float)(gps[heading+3]-48)*0.1;
else if(request==utc_day)
r=(gps[utc_day+0]-48)*10+(gps[utc_day+1]-48);
else if(request==utc_month)
r=(gps[utc_month+0]-48)*10+(gps[utc_month+1]-48);
else if(request==utc_year)
r=(gps[utc_year+0]-48)*10+(gps[utc_year+1]-48);
else
{
debug(555);
while(1); // error
r = 0;
}
return r;
}
void init_gps()
{ //delayms(40000); //may require delay on cold start for gps module to acquire satellites
debug_init();
serial_set_baud_rate(4800);
char buf[1];
// request 1 char at a time from gps and copy to char array gps[]
int gps_index, byte_count;
for(gps_index=0;gps_index<=649;gps_index++)
{ serial_receive(buf,1);
byte_count = serial_get_received_bytes();
while(byte_count == 0) byte_count = serial_get_received_bytes();
gps[gps_index]=buf[0];
}
//find first instance of "$GPRMC" in gps[]
char type[6] = "$GPRMC";
int type_matched = 0;
int type_index;
for(gps_index=0;gps_index<=644;gps_index++)
{ for(type_index=0; type_index<=5;type_index++)
{ if(gps[gps_index+type_index] == type[type_index]) type_matched=1;
else
{ type_matched = 0;
break;
}
}
if(type_matched) break;
}
// upon exit type_matched==1 and gps_index <645 else error...
if(!type_matched)
{ debug(555); // my arbitrary error code is 555
while(1);
}
// if we made it this far, everything ok
//move data to start of array...
for(int k=0;k<=65;k++) gps[k] = gps[gps_index+k];
}
int main()
{
init_gps();
// at this point you may access gps values captured using 'get_gps(<keyword>)'
// where <keyword> is any of: utc_hours, utc_minutes, utc_seconds, latitude,
// longitude, speed, heading, utc_day, utc_month, utc_year
// return type is float
// note:
// [-]longitude -> west of prime meridian, [-]latitude -> south of equator
//example queries...
//float lon = get_gps(longitude);
//debug(lon);
//debug(get_gps(latitude));
//delayms(5000);
//debug(get_gps(utc_hours));
while(1); // wait forever
return 0;
}
gpsdebug.zip (2.45 KB)